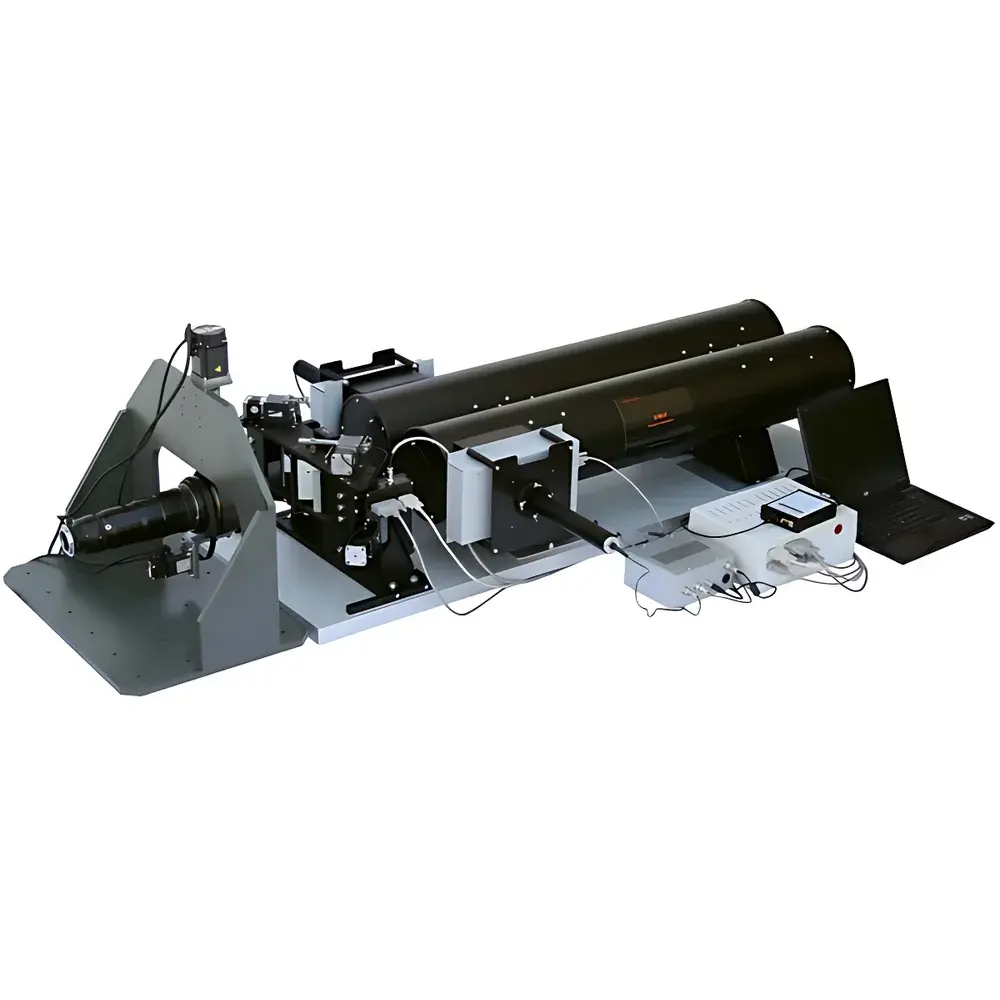
Inframet SIMAT Dynamic Target Simulator
| Brand | Inframet |
|---|---|
| Origin | Poland |
| Model | SIMAT |
| Spectral Range | 1–5.5 µm (expandable to UV, visible, and extended IR) |
| Field of View | Up to 120° via precision rotary stage (standard FOV: 7° circular or 5° × 5°) |
| Target Simulation | Two independent dynamic targets with adjustable angular size, position, intensity, and spectral radiance |
| Background Simulation | Variable-temperature semi-transparent blackbody |
| Control Interface | Fully computerized (trajectory, speed, radiometric parameters, timing synchronization) |
| Optical Architecture | Dual off-axis reflective collimators + beam combiner |
| Angular Size Adjustment | Motorized aperture + reflective mirror positioning |
| Radiance Control | Blackbody temperature tuning + neutral density filters |
| Compliance | Designed for laboratory-based IR sensor characterization per MIL-STD-3009, ISO 12233 Annex E, and NATO AEP-44 test protocols |
Overview
The Inframet SIMAT Dynamic Target Simulator is a high-fidelity, modular infrared scene projection system engineered for rigorous laboratory evaluation of thermal imaging sensors, infrared seekers, and electro-optical tracking systems. Operating on the principle of calibrated blackbody radiation coupled with precision reflective collimation, the SIMAT generates physically realistic, temporally resolved target signatures within a controllable thermal background. Unlike static or LED-based simulators, SIMAT reproduces dynamic spatial and radiometric behavior—including variable angular size, sub-pixel motion, spectral radiance modulation, and multi-target concurrency—by leveraging dual off-axis parabolic collimators, motorized beam steering, and a thermally stabilized semi-transparent blackbody background source. Its core architecture supports traceable radiometric calibration in accordance with NIST-traceable methodologies and enables repeatable simulation of long-range aerial scenarios (e.g., aircraft, helicopters, or celestial bodies) under controlled laboratory conditions.
Key Features
- Fully computer-controlled operation via Ethernet-connected real-time controller supporting synchronized trajectory definition (linear, curved, accelerating), dwell time, and inter-target timing.
- Dual independent target channels with continuous angular size adjustment (0.1–50 mrad) via motorized iris and reflective mirror positioning—enabling precise emulation of range closure or divergence.
- High-stability background generation using a programmable semi-transparent blackbody (200–800 °C), permitting uniform, spectrally neutral background radiance with spatial homogeneity better than ±1.5% across the FOV.
- Modular spectral extension capability: base configuration covers 1–5.5 µm (MWIR/LWIR); optional UV–VIS–IR upgrade integrates broadband reflective optics and calibrated quartz-tungsten-halogen sources compliant with CIE illuminants A and D65.
- Rotary field-of-view expansion up to 120° achieved via integration with the MD2D precision goniometric stage—enabling full hemispherical sensor testing without mechanical repositioning.
- Real-time radiometric feedback loop: integrated reference detector monitors blackbody output and compensates for thermal drift during extended test sequences (>8 hours).
Sample Compatibility & Compliance
The SIMAT simulator is compatible with uncooled microbolometer arrays, cooled MCT and InSb focal plane arrays, scanning line-scan IR detectors, and hybrid EO/IR gimbal-mounted systems. It supports sensor mounting configurations conforming to ANSI/EIA-742 and ISO 10110-7 mechanical interface standards. All radiometric outputs are referenced to SI-traceable blackbody calibrations performed annually at accredited laboratories (DAkkS-certified or NVLAP-accredited). System firmware and control software comply with GLP/GMP data integrity requirements, including audit trail logging, electronic signature support, and 21 CFR Part 11–compliant user access controls. Test procedures executed on SIMAT align with MIL-STD-3009 (Section 4.3.2, Dynamic Target Characterization), ISO 18526-2 (Infrared Imaging Systems – Performance Testing), and NATO AEP-44 (Test and Evaluation of Electro-Optical Sensors).
Software & Data Management
The SIMAT Control Suite is a Windows-based application built on Qt and Python 3.9, offering deterministic real-time scheduling (sub-millisecond jitter) for trajectory execution. It includes preconfigured scenario libraries (e.g., “Approaching Jet”, “Orbiting Satellite”, “Low-Slow-Small UAV”) and supports custom scenario import via CSV or XML schema compliant with STANAG 4671 Annex B. All radiometric parameters—including target emissivity, atmospheric transmission (MODTRAN-based), and background temperature—are stored as metadata in HDF5 format alongside raw image timestamps. Export options include IEEE Std 1671-compliant ATML test reports, MATLAB .mat files, and CSV-aligned frame-by-frame parameter logs. Remote monitoring and scripting are enabled via TCP/IP API (JSON-RPC v2.0), supporting integration into automated test benches using LabVIEW, Python, or TestStand.
Applications
- Dynamic MTF and resolution limit assessment of cooled/uncooled IR imagers under simulated flight-path conditions.
- Evaluation of automatic target recognition (ATR) algorithm robustness against angular size variation, radiometric contrast reversal, and background clutter gradients.
- Characterization of tracker lock-on latency, break-lock thresholds, and centroiding accuracy for gimbaled IR seekers.
- Validation of radiometric non-uniformity correction (NUC) stability over extended operational cycles with modulated scene content.
- Development and verification of countermeasure effectiveness models (e.g., DIRCM susceptibility analysis) using precisely timed dual-target engagements.
- Support for academic and defense research in IR phenomenology, including validation of synthetic scene generators (e.g., DIRSIG, OPG) against physical ground truth.
FAQ
What spectral bands does the standard SIMAT configuration support?
The base system operates from 1.0 to 5.5 µm, optimized for MWIR and LWIR applications. UV–VIS extension requires the optional broadband optical path and calibrated lamp sources.
Can SIMAT simulate more than two simultaneous targets?
The hardware supports two independently controlled targets; additional targets require external beam multiplexing or sequential simulation with sub-frame timing synchronization.
Is radiometric calibration included with delivery?
Yes—a full factory calibration report with uncertainty budget (k=2) is provided, covering blackbody temperature accuracy (±0.3°C), angular size repeatability (±0.02 mrad), and spectral responsivity across all configured bands.
Does SIMAT support real-time closed-loop testing with external sensors?
Yes—via TTL trigger I/O and low-latency Ethernet streaming, enabling hardware-in-the-loop (HIL) integration with tracking processors or embedded vision systems.
What is the maximum angular velocity achievable for target motion?
Up to 150°/s is attainable using the MD2D rotary stage, limited by mechanical inertia and required trajectory smoothness for sensor response fidelity.




