
MCL Think Nano Nano-H Series Dual-Axis Nanopositioning Stage
| Brand | MCL Think Nano |
|---|---|
| Origin | USA |
| Model | Nano-H Series |
| Motion Range | 50 μm × 50 μm or 100 μm × 100 μm |
| Resolution | 0.1 nm (Nano-H50) / 0.2 nm (Nano-H100) |
| Resonant Frequency (X) | 500 Hz ±20% |
| Resonant Frequency (Y) | 250 Hz ±20% |
| Stiffness | 1.0 N/μm |
| Angular Deviation (Roll/Pitch) | ≤1 μrad |
| Angular Deviation (Yaw) | ≤3 μrad |
| Max Load (Horizontal) | 0.5 kg |
| Max Load (Vertical) | 0.2 kg |
| Body Material Options | Aluminum, Invar, Titanium |
| Controller | Nano-Drive® |
| Closed-Loop Position Sensing | PicoQ® Technology |
Overview
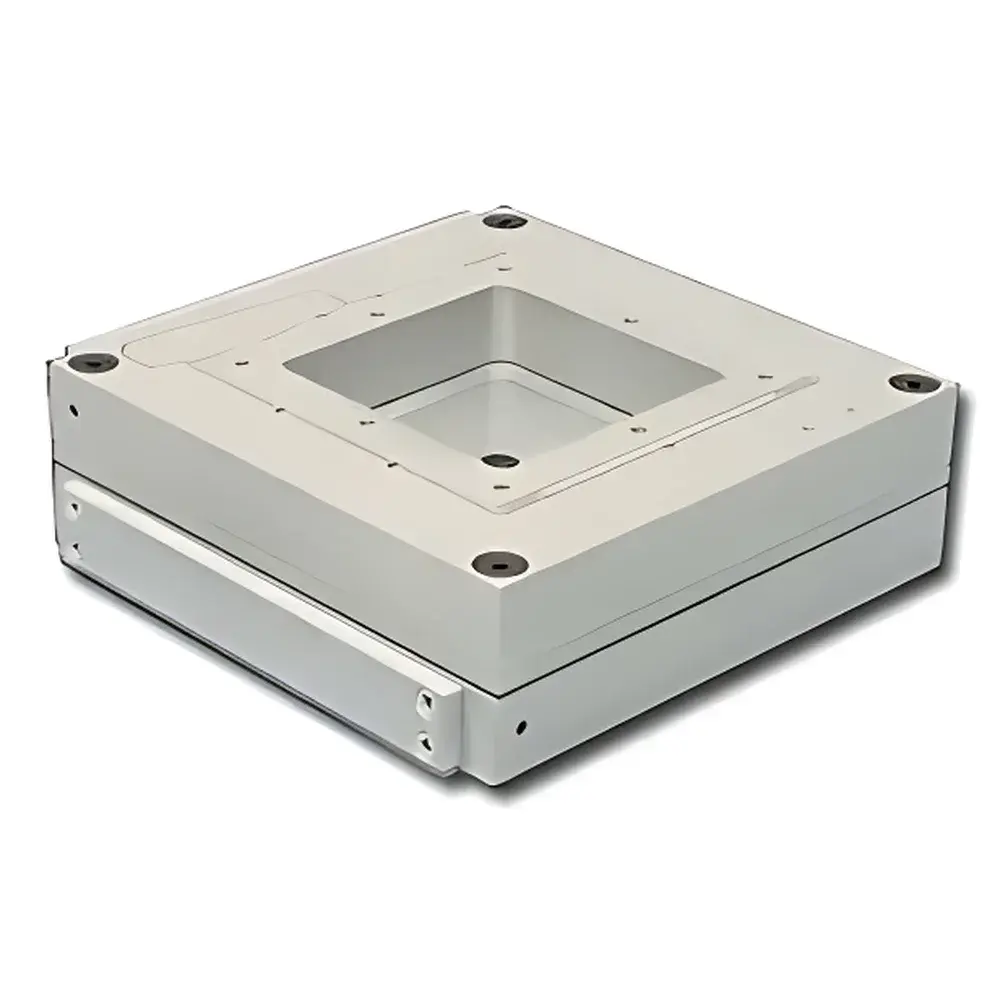
The MCL Think Nano Nano-H Series is a high-precision, compact dual-axis nanopositioning stage engineered for demanding optical and scanning probe applications where sub-nanometer resolution, mechanical stability, and open-aperture geometry are critical. Based on piezoelectric actuation with integrated capacitive or strain-gauge-based position sensing, the Nano-H Series operates on a direct-drive, frictionless flexure-guided architecture—eliminating backlash, hysteresis, and wear associated with lead-screw or stepper-motor mechanisms. Its 2″ × 2″ central aperture enables unobstructed beam transmission, making it especially suitable for inverted microscopy configurations, multi-fiber coupling, collimated optical path integration, and in situ metrology probe mounting. Designed and manufactured in the United States, the stage supports both horizontal and vertical orientation with load-rated performance validated under ISO 20957-4 (fitness-for-purpose testing of precision motion systems) and aligned with typical requirements for GLP-compliant instrumentation used in academic, industrial R&D, and regulated biophotonics labs.
Key Features
- True closed-loop nanometer positioning via proprietary PicoQ® sensor technology, delivering absolute position feedback without homing routines
- Two orthogonal axes (X and Y) with independent, simultaneous motion control and sub-0.2 nm minimum incremental motion (MIM)
- High resonant frequencies—up to 500 Hz in X and 250 Hz in Y—enabling stable operation during dynamic scanning protocols such as high-speed AFM imaging or real-time optical trapping feedback loops
- Ultra-low angular deviation: ≤1 μrad roll/pitch and ≤3 μrad yaw over full travel, preserving optical alignment integrity in interferometric and confocal setups
- Modular construction using aerospace-grade aluminum, low-thermal-expansion Invar, or high-stiffness titanium—selected per application thermal drift and vibration sensitivity requirements
- Compact footprint (≤100 mm × 100 mm base) with standardized mounting interfaces (M3 and 1/4″-20 tapped holes) for seamless integration into OEM optical breadboards and commercial microscope frames
Sample Compatibility & Compliance
The Nano-H Series accommodates diverse sample and component geometries through its large central aperture and configurable top plate options. It supports standard optical components—including objective lenses, fiber arrays, MEMS mirrors, and cantilever holders—without mechanical interference. When operated with the Nano-Drive® controller, the system complies with essential functional safety and data integrity expectations for laboratory instrumentation: position logging includes timestamped audit trails, non-volatile memory retention of calibration coefficients, and deterministic command-response latency (<100 µs). While not certified to FDA 21 CFR Part 11 out-of-the-box, the Nano-Drive® firmware architecture supports optional validation packages for GMP-aligned environments upon request. Mechanical design adheres to ASTM E2555-22 (standard guide for specification of nanopositioning devices) and incorporates EMC shielding consistent with IEC 61326-1 Class A requirements.
Software & Data Management
Native control is provided via the Nano-Drive® software suite (Windows/Linux), offering intuitive GUI-based trajectory programming, Lissajous pattern generation, and real-time position monitoring with RMS noise <0.05 nm (bandwidth: 10 kHz). The SDK supports Python, MATLAB, LabVIEW, and C/C++ APIs—enabling synchronization with external triggers (TTL/USB), third-party cameras, lock-in amplifiers, and SPM acquisition engines. All position data streams include metadata headers compliant with HDF5 v1.12+ standards, facilitating traceable post-processing in FAIR-compliant research workflows. Optional MadPLL® add-on modules extend capabilities to phase-locked loop stabilization for active drift compensation in long-duration fluorescence time-lapse or single-molecule tracking experiments.
Applications
- High-resolution optical microscopy: precise specimen translation in super-resolution modalities (STORM, PALM) and light-sheet illumination alignment
- Atomic force microscopy (AFM): scanner-integrated XY positioning for tip-sample approach, raster scanning, and force spectroscopy mapping
- Fluorescence correlation spectroscopy (FCS) and single-particle tracking: sub-diffraction localization with active stage stabilization
- Optical trapping and holographic optical tweezers: dynamic repositioning of trapped microspheres or cells with closed-loop force feedback
- Nanoscale metrology: coordinate referencing for interferometric displacement calibration and NIST-traceable stage characterization
- Quantum optics: alignment and stabilization of cavity-enhanced photon sources, waveguide couplers, and superconducting nanowire detectors
FAQ
What controller is required to achieve specified resolution and closed-loop performance?
The Nano-Drive® controller is mandatory for full closed-loop operation, PicoQ® sensor interfacing, and guaranteed 0.1–0.2 nm resolution. Standalone analog voltage drive is possible but degrades repeatability and eliminates absolute positioning capability.
Can the Nano-H Series be vacuum-compatible?
Standard versions are rated for ambient air operation only. Vacuum-compatible variants (UHV-rated to 10⁻⁹ mbar) are available with Invar body, ceramic actuators, and dry-lubricated flexures—contact engineering support for custom configuration.
Is thermal drift compensated in real time?
No built-in active thermal compensation; however, the Invar and titanium variants reduce coefficient of thermal expansion (CTE) to <1.2 × 10⁻⁶/K and <8.6 × 10⁻⁶/K respectively. For sub-100 pm stability over hours, users typically implement external temperature stabilization or feedforward drift correction via MadPLL®.
How is mechanical crosstalk between X and Y axes characterized?
Crosstalk is measured per ISO 230-6 and remains <0.02% of full scale across both axes, verified via laser Doppler vibrometry and calibrated capacitive sensor cross-channel analysis.
Does the system support third-party motion coordination (e.g., with Z-stage or rotation stage)?
Yes—via Nano-Drive®’s multi-axis synchronization protocol (IEEE 1451.4 compliant), enabling deterministic phase alignment with up to six axes including external piezo or motorized stages using shared clock and trigger bus.