CompDC Robot Accuracy Calibration System by Dynalog
| Origin | USA |
|---|---|
| Manufacturer Type | Authorized Distributor |
| Origin Category | Imported |
| Model | CompDC |
| Pricing | Available Upon Request |
Overview
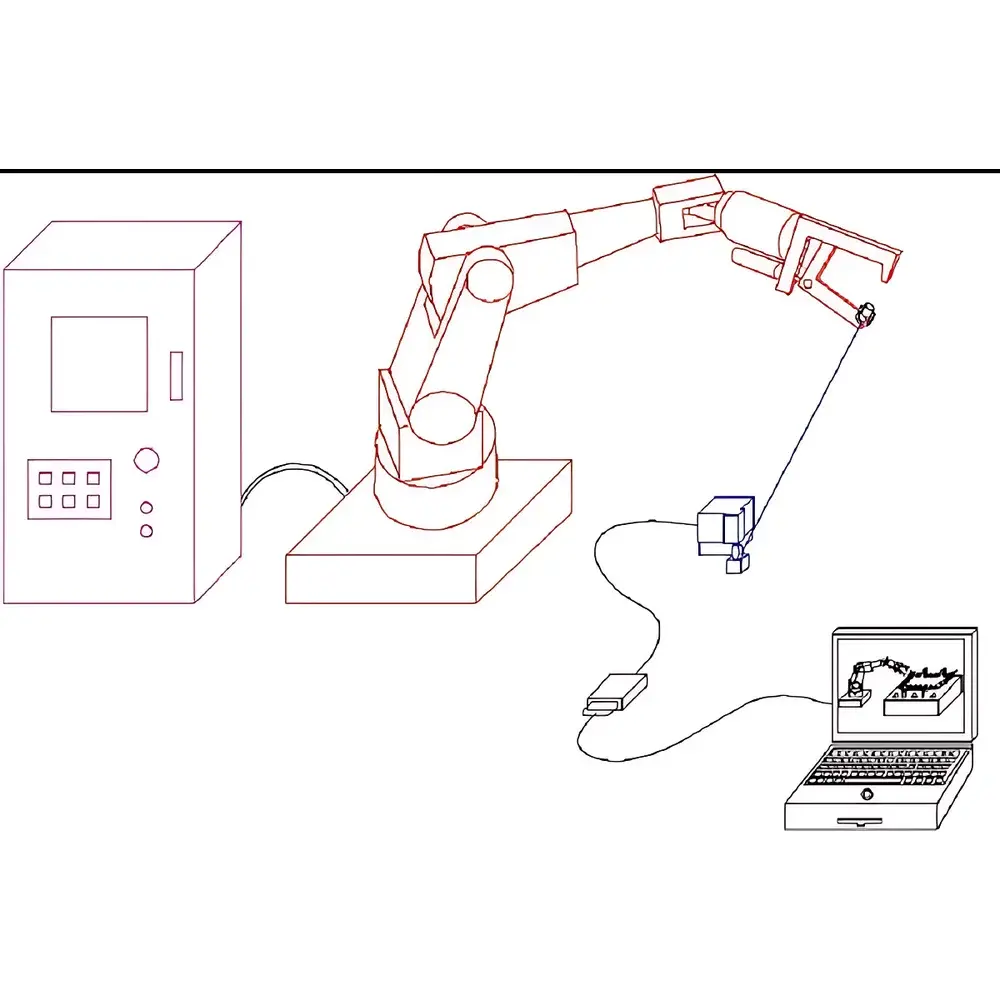
The CompDC Robot Accuracy Calibration System is a comprehensive, standards-compliant metrology platform developed by Dynalog Inc. (USA) for industrial robot performance validation, geometric parameter identification, and real-time compensation. Engineered for precision and traceability, the system implements laser-based non-contact measurement principles—primarily utilizing high-stability HeNe laser interferometry and linear array photodiode sensing—to quantify six-degree-of-freedom (6D) pose errors (X, Y, Z, W, P, R) in accordance with ISO 9283, ANSI/RIA R15.05, and GB/T 12642. These international standards define the foundational metrics for robot accuracy, repeatability, path fidelity, and thermal stability—making the CompDC system suitable for factory acceptance testing (FAT), process validation, and continuous monitoring in production environments. Unlike generic alignment tools, the CompDC architecture integrates hardware calibration, model-based error compensation, and environmental drift correction into a unified workflow—from initial kinematic identification to long-term operational integrity assurance.
Key Features
- Full 6D pose measurement (position + orientation) with sub-micron spatial resolution and arc-second angular sensitivity
- Compliance with ISO 9283, ANSI/RIA R15.05, and GB/T 12642 test protocols—including path accuracy, pose repeatability, cornering deviation, and acceleration-dependent trajectory fidelity up to 50 m/s²
- Integrated thermal drift compensation via dual high-precision laser emitters and ambient-filtered linear array sensors
- Real-time TCP (Tool Center Point) and home position revalidation with <10 ms response latency
- Automated kinematic parameter identification: link lengths, joint offsets, axis parallelism, gear backlash, and coupling ratios
- Two-stage compensation architecture—direct parameter upload to robot controllers and program-level filtering for legacy or proprietary control systems
- Embedded Windows CE 6.0 microprocessor with 3.5-inch touchscreen interface and local data logging
- Gigabit Ethernet connectivity for remote diagnostics, audit-trail-enabled software updates, and integration into MES/SCADA infrastructures
Sample Compatibility & Compliance
The CompDC system supports all major industrial robot architectures—including articulated, SCARA, delta, and Cartesian configurations—with payload capacities ranging from 3 kg to 1,500 kg. It interfaces natively with controllers from ABB, FANUC, KUKA, Yaskawa/Motoman, Stäubli, Nachi, Kawasaki, Panasonic, and domestic manufacturers including ESTUN, INOVANCE, GSK, and EFORT. All measurement procedures adhere to GLP-aligned documentation practices, supporting FDA 21 CFR Part 11–compliant electronic records when deployed with validated software versions. Traceable calibration certificates are issued per ISO/IEC 17025 requirements through Dynalog’s NIST-traceable reference laboratory in Rochester, NY. The system meets CE, FCC Class A, and RoHS directives for global deployment.
Software & Data Management
Dynalog’s proprietary CalSuite™ software provides end-to-end workflow management—from automated test sequence generation and real-time error mapping to ISO 9283–formatted reporting and compensation file export (e.g., .xml, .csv, or vendor-specific binary formats). The software enforces role-based access control, full audit trails (user actions, timestamped parameter changes, firmware revisions), and version-controlled configuration backups. Raw sensor data is stored in HDF5 format for post-processing interoperability with MATLAB, Python (NumPy/Pandas), or third-party metrology suites. Optional cloud synchronization enables centralized fleet-wide accuracy benchmarking across multi-site manufacturing operations, with TLS 1.2–encrypted data transmission and on-premise deployment options for regulated environments.
Applications
- Factory acceptance testing (FAT) and commissioning of new robot installations
- Kinematic model refinement for offline programming (OLP) and digital twin fidelity enhancement
- Thermal drift monitoring during extended cycle operation in automotive welding, aerospace composite layup, and battery module assembly
- Periodic verification of robot performance under ISO/IEC 17025–accredited quality management systems
- Root-cause analysis of positional inconsistency in high-precision dispensing, vision-guided pick-and-place, and micron-level assembly tasks
- Support for robotics R&D in academic institutions and national labs requiring traceable uncertainty budgets per GUM (JCGM 100)
FAQ
Does the CompDC system require robot controller modification or firmware updates?
No. The system operates externally using optical sensing and does not require any firmware changes, controller access permissions, or OEM SDK integration. Compensation parameters are applied either via standard controller configuration files or runtime program filtering.
Can the system validate robots operating at speeds exceeding 3 m/s?
Yes. The optical subsystem supports dynamic path evaluation up to 5 m/s and acceleration profiles up to 50 m/s² (5G), satisfying high-speed packaging, palletizing, and material handling validation requirements.
Is temperature compensation performed in real time or post-processing?
Both. AccuBeam modules execute closed-loop thermal drift correction during operation, while CalSuite™ enables retrospective thermal correlation analysis using synchronized ambient and joint temperature logs.
What documentation is provided for regulatory audits?
Each system ships with a Certificate of Conformance, NIST-traceable calibration report, ISO 9283 test protocol templates, and software validation summary (IQ/OQ documentation available upon request).






