AutoCal AC Robotic Repeatability Test System
| Origin | USA |
|---|---|
| Manufacturer Type | Authorized Distributor |
| Origin Category | Imported |
| Model | AC |
| Pricing | Available Upon Request |
Overview
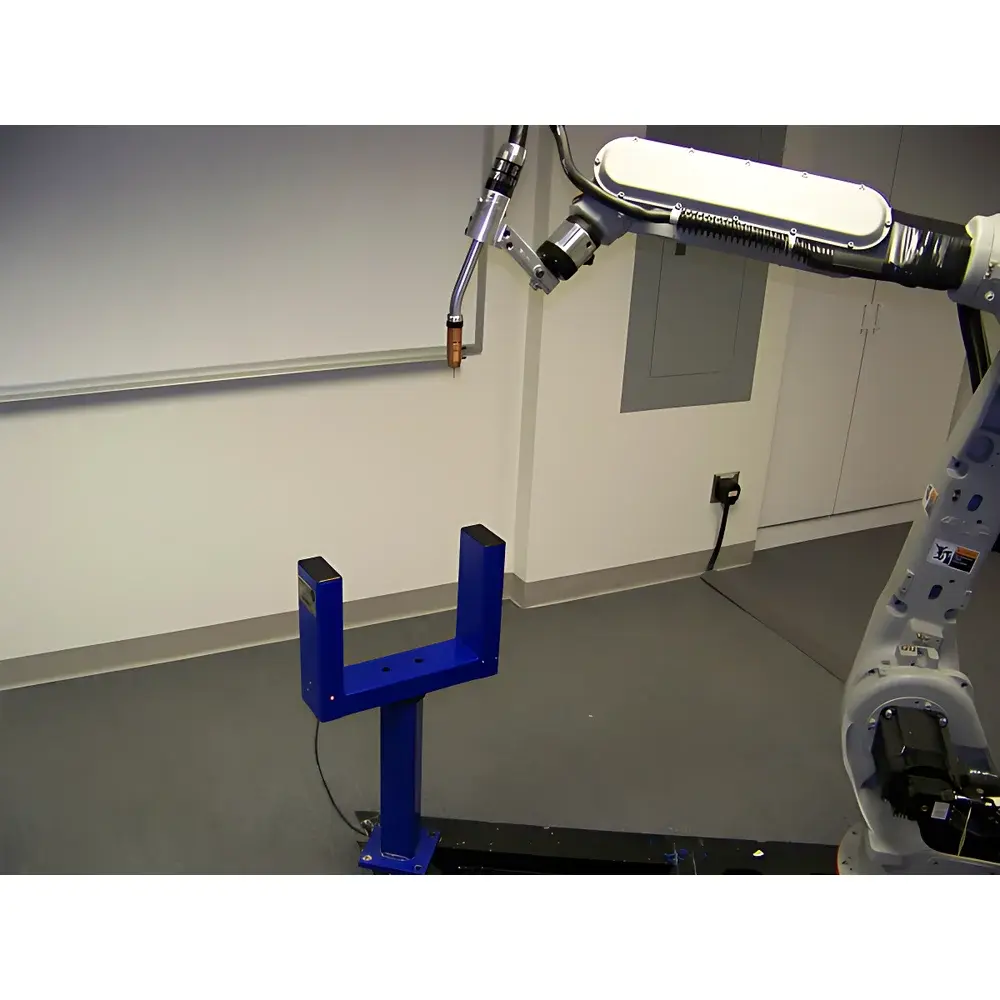
The AutoCal AC Robotic Repeatability Test System is an industrial-grade metrology solution engineered for quantitative, high-frequency assessment of robotic pose repeatability—defined as the spatial consistency of a robot’s end-effector returning to a commanded position and orientation across repeated cycles. Unlike qualitative visual inspection or time-intensive coordinate measuring machine (CMM) validation, the AutoCal AC employs a non-contact laser curtain measurement principle based on triangulated optical interruption detection. A collimated laser beam forms a planar light sheet (U-shaped hardware geometry) with precisely aligned photodetector arrays positioned opposite the emitter. As the robot’s tool center point (TCP) intersects this calibrated plane, sub-millisecond timing and spatial interpolation yield synchronized 6-DOF (X, Y, Z, W, P, R) pose records. This architecture eliminates mechanical hysteresis, thermal drift artifacts, and operator-dependent alignment errors inherent in manual or probe-based methods—making it suitable for production-line validation, post-maintenance verification, and ISO/IEC 17025-compliant calibration laboratories.
Key Features
- Non-contact, real-time laser curtain sensing with <10 µs response latency and sub-0.02 mm positional resolution under controlled ambient conditions
- Integrated hardware footprint: 13″ × 8″ × 1.5″ (L × W × H), designed for rapid deployment adjacent to robotic workcells without interfering with operational envelope
- Dedicated microcontroller unit (MCU) for deterministic data acquisition synchronization with robot controller I/O triggers (e.g., digital start/stop signals)
- Standard test cycle completion in ≤60 seconds; fast-check mode delivers preliminary repeatability statistics within 3–5 seconds per target pose
- Robust electrical design: 12–24 VDC nominal input, 50 mA max current draw, conforming to IEC 61000-6-2 immunity standards
- Operational temperature range: 15–130 °F (−9.4 to 54.4 °C), enabling use in unconditioned factory environments including paint booths and metal stamping lines
Sample Compatibility & Compliance
The AutoCal AC system supports all industrial articulated, SCARA, delta, and Cartesian robots with programmable TCP motion and standard digital I/O interfaces (e.g., Fanuc R-30iB, ABB IRC5, KUKA KRC4, Yaskawa DX200). It does not require robot-specific firmware modifications or proprietary communication protocols—operation relies solely on externally triggered pose sampling via discrete signal handshake. Data output conforms to ASTM E2922-21 “Standard Practice for Evaluating Robot Pose Repeatability Using External Metrology Systems” and aligns with ISO 9283:2018 requirements for repeatability testing methodology. All measurement records include timestamped metadata (UTC epoch, robot controller ID, joint configuration snapshot) to support GLP/GMP audit trails when integrated with enterprise MES or QMS platforms.
Software & Data Management
The AutoCal Calibration Software Suite (v4.x) provides native Windows 10/11 support with configurable test templates, statistical process control (SPC) charting (X̄-R, Cp/Cpk), and automated report generation in PDF and CSV formats. Raw pose datasets are stored in HDF5 format with embedded calibration certificates and sensor traceability logs. The software implements role-based access control (RBAC), electronic signature capability per FDA 21 CFR Part 11, and optional encrypted cloud backup via TLS 1.3–secured API endpoints. Audit logs record all user actions—including parameter edits, report exports, and calibration updates—with immutable timestamps and operator IDs.
Applications
- Production line acceptance testing of new robotic cells prior to commissioning
- Periodic performance verification during preventive maintenance intervals
- Quantitative comparison of repeatability before/after gearbox or servo motor replacement
- Root cause analysis of dimensional drift in high-precision assembly (e.g., battery module stacking, aerospace fastener insertion)
- Supporting ISO/TS 16949 and IATF 16949 process capability documentation for automotive Tier 1 suppliers
- Academic robotics labs conducting comparative studies of trajectory planning algorithms under load variation
FAQ
Does the AutoCal AC require robot manufacturer-specific drivers or SDKs?
No. It operates via hardware-level digital I/O synchronization and does not interface with robot controller networks or proprietary APIs.
Can the system measure repeatability at multiple poses simultaneously?
Yes—users define up to 100 discrete target locations per test sequence; each pose is sampled independently with full 6-DOF logging.
Is NIST-traceable calibration documentation provided with the system?
Yes. Each shipped unit includes a factory calibration certificate referencing NIST SRM 2036 (dimensional standards) and ISO/IEC 17025-accredited verification.
What is the recommended recalibration interval?
Annual recalibration is advised under normal industrial use; biannual verification is required if operating in environments exceeding 100 °F or subject to mechanical shock >5 g.
Can test data be exported to MATLAB or Python for custom statistical analysis?
Yes—CSV and HDF5 exports include columnar pose data, timestamps, and metadata compatible with NumPy, Pandas, and SciPy workflows.
Related Products
")

")
