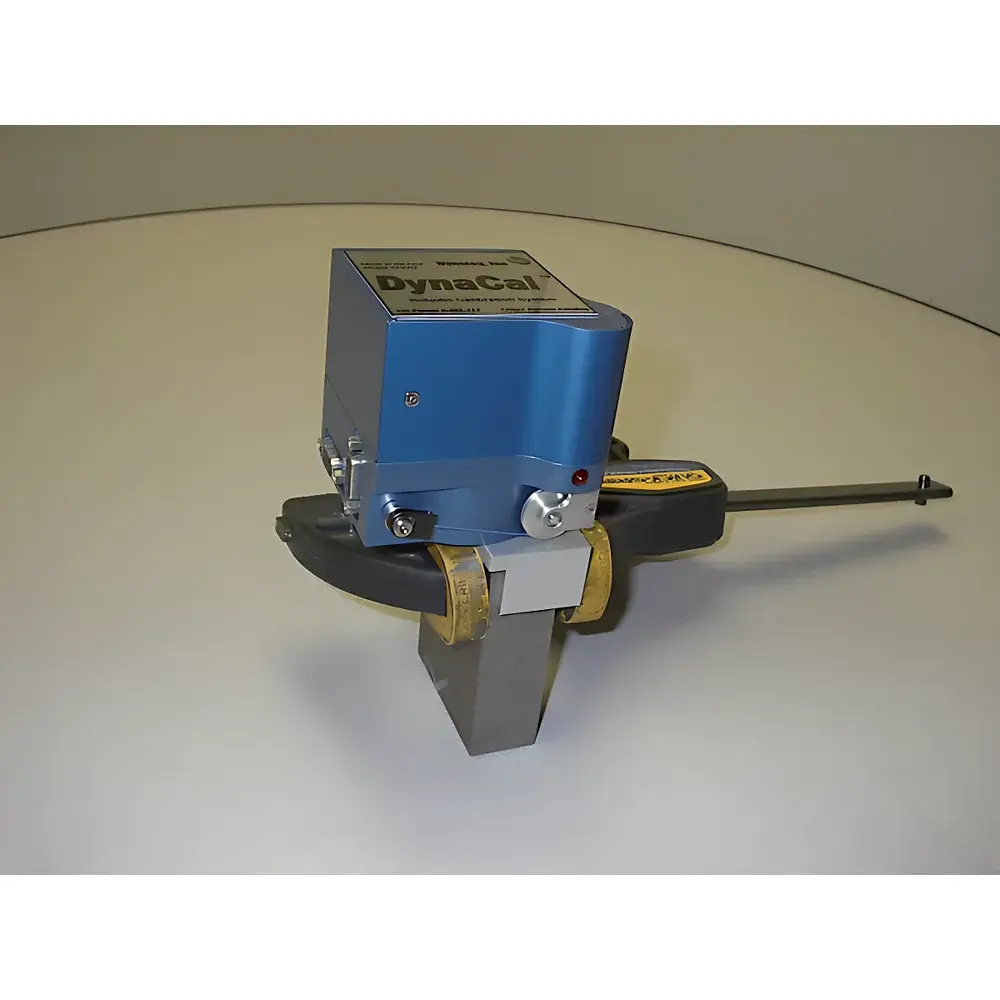
DynaCal Robot Calibration System
| Origin | USA |
|---|---|
| Manufacturer Type | Authorized Distributor |
| Origin Category | Imported |
| Model | DynaCal |
| Pricing | Available Upon Request |
Overview
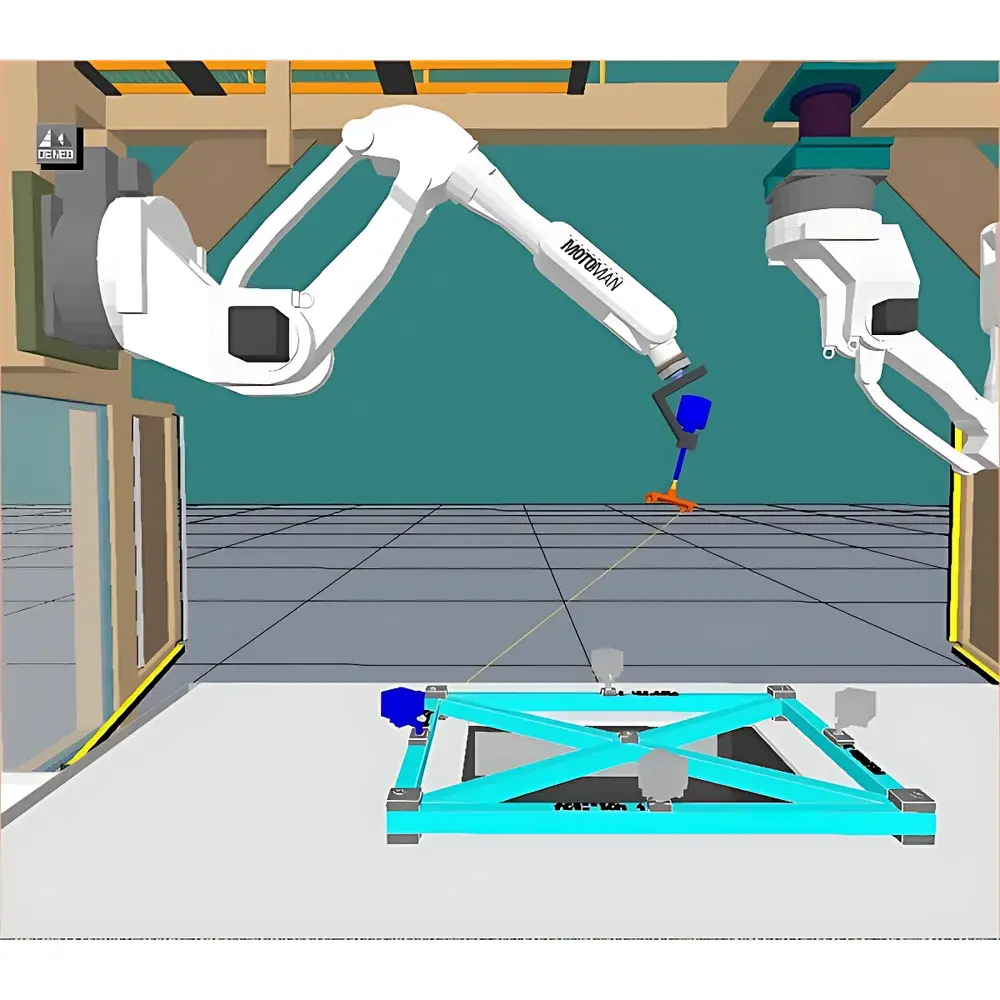
The DynaCal Robot Calibration System is an industrial-grade metrology solution engineered for high-precision kinematic calibration of articulated robotic arms used in automated manufacturing environments. Based on first-principles geometric modeling and multi-point spatial measurement, DynaCal employs a proprietary algorithmic framework to identify and compensate for deviations between the robot’s nominal Denavit–Hartenberg (DH) parameters and its as-built physical configuration. Unlike conventional teach-pendant-based manual tuning or single-point TCP verification, DynaCal performs full 6-degree-of-freedom (6-DOF) error mapping across the entire workspace using traceable reference measurements—typically acquired via laser tracker, photogrammetric system, or high-accuracy coordinate measuring machine (CMM). This enables quantitative characterization of systematic errors including joint axis misalignment, link length variation, base frame offset, and tool center point (TCP) orientation drift—critical factors that directly impact repeatability, path accuracy, and inter-system interoperability.
Key Features
- Full kinematic model identification: Simultaneous estimation of all DH parameters—including link offsets, twist angles, joint offsets, and link lengths—based on least-squares optimization over hundreds of spatial measurement points.
- Multi-sensor compatibility: Integrates with industry-standard metrology hardware (e.g., Leica AT960, API Radian, Nikon Metrology iSpatial) via IEEE 1451-compliant interface protocols.
- Real-time compensation engine: Generates calibrated robot controller firmware patches or external motion correction layers compliant with ROS 2, KUKA KRL, FANUC KAREL, and ABB RAPID environments.
- Automated workflow orchestration: Supports unattended calibration runs with built-in collision avoidance logic, trajectory validation, and ISO 9283-compliant motion sequence generation.
- Audit-ready documentation: Auto-generates calibration certificates per ISO/IEC 17025 requirements, including uncertainty budgets, measurement traceability chains, and revision-controlled parameter logs.
Sample Compatibility & Compliance
DynaCal supports six-axis articulated robots from major OEMs including ABB, KUKA, FANUC, Yaskawa, Universal Robots, and Stäubli. It accommodates payloads ranging from 3 kg to 1,300 kg and reaches up to 3.7 m. The system complies with ISO 9283 (robot performance criteria), ISO 10218-1/-2 (safety requirements for industrial robots), and ANSI/RIA R15.06. Calibration procedures are designed to meet GLP (Good Laboratory Practice) and GMP (Good Manufacturing Practice) documentation standards where applicable, and support FDA 21 CFR Part 11 compliance through electronic signature and audit trail capabilities within the DynaCal Manager software suite.
Software & Data Management
DynaCal Manager is a Windows-based engineering application delivering end-to-end calibration lifecycle management. It provides role-based access control, versioned parameter databases, and export functionality for XML-based robot configuration files compatible with offline programming platforms (e.g., RobotStudio, RoboDK, Process Simulate). All raw measurement data, intermediate Jacobian matrices, residual error plots, and final compensated DH parameter sets are stored in SQLite-backed local repositories with optional synchronization to secure enterprise cloud storage. Data exports conform to ASTM E2911-13 (standard guide for reporting calibration results) and include metadata fields for operator ID, environmental conditions (temperature, humidity), and sensor calibration validity dates.
Applications
- Offline programming deployment: Enables direct transfer of simulation-generated paths to production cells without manual jog-and-teach refinement—reducing commissioning time by up to 70%.
- Robot cell cloning: Replicates calibrated kinematic models across identical robot units installed at different sites, ensuring consistent process execution across global manufacturing networks.
- Relocation validation: Verifies positional fidelity after mechanical relocation of robot cells—essential for modular factory reconfiguration and contract manufacturing transitions.
- Preventive maintenance: Detects progressive degradation in joint encoder alignment or mechanical backlash before it exceeds ISO 9283 repeatability thresholds.
- Collision recovery: Re-establishes base frame integrity and TCP geometry following unplanned tool or structure impacts, minimizing downtime versus full re-teach cycles.
FAQ
What types of robots does DynaCal support?
DynaCal supports standard six-axis serial manipulators with open or proprietary controller interfaces. Support includes native drivers for KUKA KRC4/KRC5, ABB IRC5/Single Cabinet, FANUC R-30iB/Mate, and UR e-Series/CB3. Custom driver development is available under NDA for non-standard architectures.
Is third-party metrology hardware required?
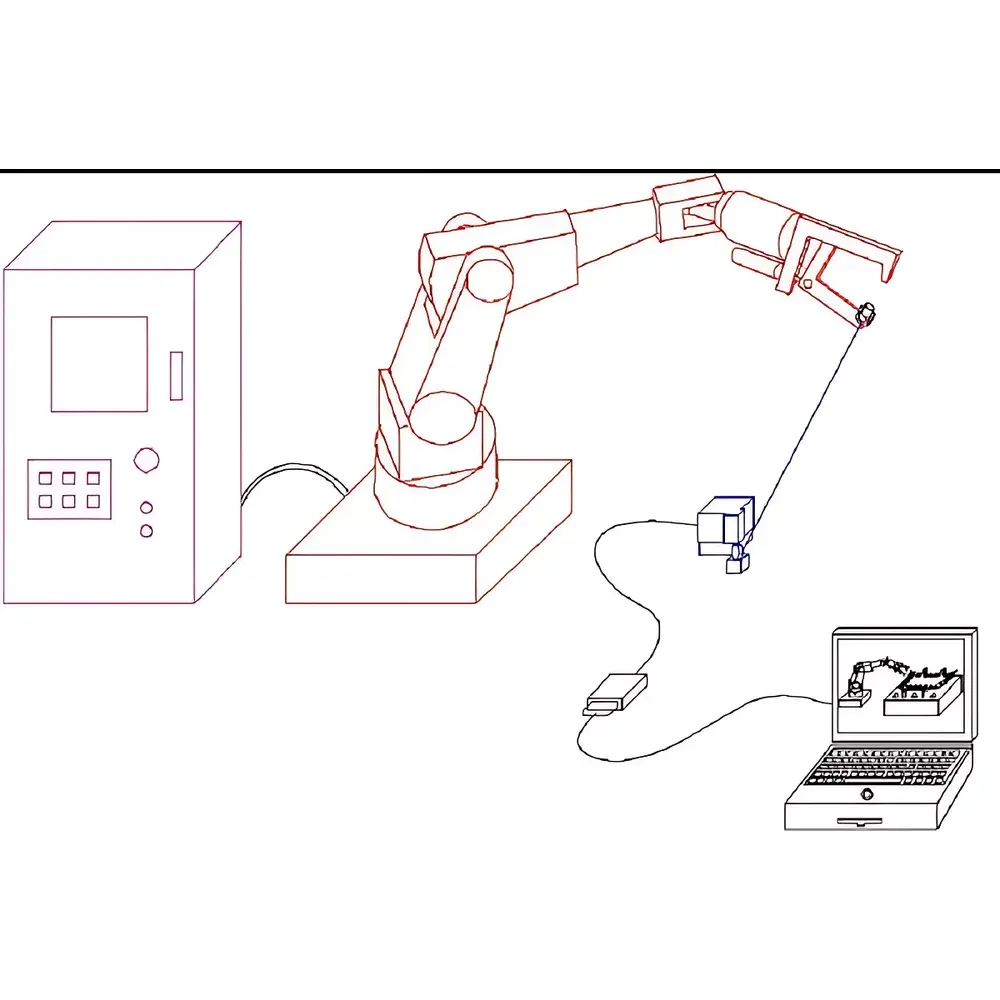
Yes. DynaCal requires an external high-accuracy spatial measurement system—typically a laser tracker (ISO 10360-12 compliant) or photogrammetric array—with sub-50 µm volumetric accuracy. DynaCal does not include embedded sensors.
Can calibration data be exported to PLC or MES systems?
Yes. Through OPC UA server integration and CSV/JSON API endpoints, calibrated DH parameters and uncertainty metrics can be published to SCADA, MES, or digital twin platforms for real-time process monitoring and predictive maintenance analytics.
How frequently should recalibration be performed?
Recommended recalibration intervals follow ISO 10791-6 guidelines: annually for stable installations; quarterly for high-cycle or thermally variable environments; and immediately after structural modification, collision events, or controller firmware updates.
Does DynaCal require robot controller modification?
No. DynaCal operates externally—either by injecting motion corrections into the controller’s trajectory planner or by generating updated DH parameter sets for native controller upload. No firmware patching or kernel-level access is necessary.



