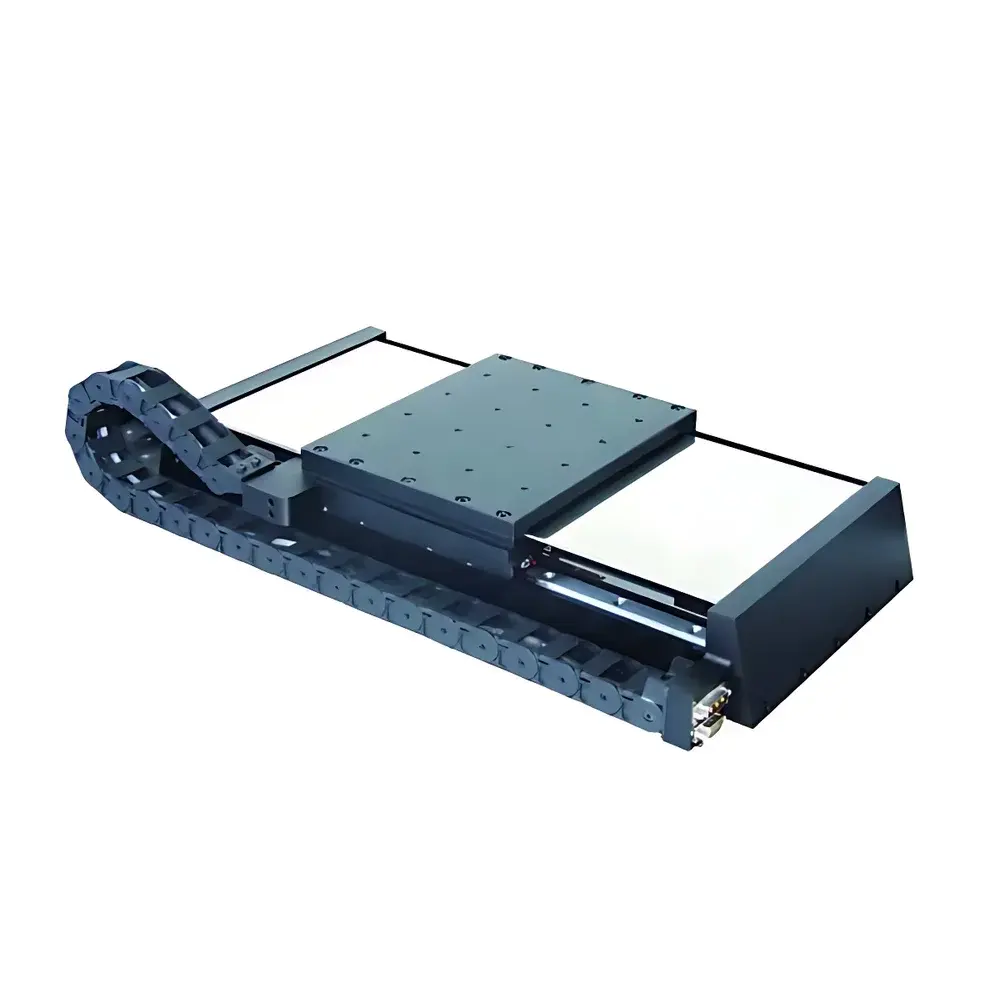
ZOLIX LMA Series Linear Motor Translation Stage
| Brand | ZOLIX |
|---|---|
| Origin | Beijing, China |
| Manufacturer Type | OEM Manufacturer |
| Product Category | Domestic (China-made) |
| Model | LMA Series |
| Product Type | Motorized Translation Stage |
| Key | Encoder Resolution (µm): 0.1 / 1 / 5 (selectable) |
| Key | Travel Range (mm): 100–1000 |
| Key | Max Theoretical Speed (m/s): 3–10 |
| Key | Repeatability (mm): ≤0.001 |
| Key | Positioning Accuracy (mm): ±0.005 or ±0.010 |
| Key | Straightness (µm/100 mm): <3–<5 |
| Key | Flatness (µm/100 mm): <5–<8 |
| Key | Yaw (arcsec): <10–<15 |
| Key | Pitch (arcsec): <15–<20 |
| Key | Horizontal Load Capacity (kg): 25–55 |
| Key | Mass (kg): 10–30 |
Overview
The ZOLIX LMA Series Linear Motor Translation Stage is an engineered solution for high-precision optical positioning in research-grade and industrial metrology environments. Based on direct-drive linear motor actuation—eliminating mechanical backlash, gear wear, and transmission hysteresis—the stage delivers continuous, smooth motion with exceptional dynamic response. Its core architecture follows the Couette-type electromagnetic principle: Lorentz-force-driven motion between permanent magnet arrays and copper windings ensures deterministic force-to-current linearity, enabling nanometer-level trajectory control when paired with high-resolution feedback. Designed specifically for applications demanding sub-micron repeatability over extended travel ranges (up to 1000 mm), the LMA series integrates precision motion mechanics with robust environmental resilience—making it suitable for cleanroom-compatible optical alignment, interferometric setup adjustment, multi-axis scanning platforms, and automated spectroscopic sample positioning.
Key Features
- Direct-drive linear motor with zero-backlash operation and high torque density—optimized for acceleration up to 1 g and sustained velocities of 3–10 m/s depending on stroke length.
- SP-grade imported linear roller guides with four-point preloaded滑块 (linear滑块)—ensuring load capacity from 25 kg to 55 kg while maintaining straightness better than 3 µm per 100 mm across shorter strokes.
- Dual non-contact optical limit switches mounted at both ends of travel—providing programmable deceleration zones and hard-stop protection without mechanical contact wear.
- Hydraulic damping buffers at each end—absorbing kinetic energy during high-speed approach to limits, reducing peak impact force by >70% compared to spring-based solutions.
- Replaceable polyurethane anti-collision bumpers—installed as a tertiary safety layer to prevent damage during unexpected overtravel or controller fault conditions.
- Modular encoder interface supporting either glass scale or steel tape scale options—with selectable resolution down to 0.1 µm—enabling calibration traceability to ISO 10791-6 and compatibility with third-party motion controllers compliant with SSI, EnDat 2.2, or BiSS-C protocols.
Sample Compatibility & Compliance
The LMA stage is designed for integration into vacuum-compatible (optional sealing), temperature-stable (15–25 °C operational range), and low-vibration optical tables. Its aluminum alloy base and stainless steel structural components meet RoHS Directive 2011/65/EU requirements. Mechanical tolerances adhere to ISO 2768-mK general tolerancing standards; geometric performance metrics—including pitch, yaw, and flatness—are verified per ISO 230-2:2014 (Test Code for Machine Tools – Part 2: Determination of Accuracy and Repeatability of Positioning Numerically Controlled Axes). When configured with certified encoders and used under controlled environmental conditions, the system supports GLP-compliant positional logging when integrated with validated motion control software.
Software & Data Management
The LMA series operates natively with ZOLIX’s ZMCS Motion Control Suite (Windows/Linux), offering real-time trajectory profiling, dual-loop PID tuning, and synchronized multi-axis coordination. All position data streams support timestamped CSV export with microsecond resolution, and audit trails include operator ID, timestamp, command source (GUI/API), and error codes—facilitating compliance with FDA 21 CFR Part 11 requirements when deployed in regulated QC laboratories. Optional EtherCAT or RS-485 interfaces enable integration into larger automation frameworks governed by IEC 61131-3 PLC logic.
Applications
- Precision alignment of laser cavities, fiber couplers, and waveguide photonic circuits.
- Automated stage scanning in Raman, FTIR, and fluorescence microscopy systems requiring micron-level step-and-settle stability.
- Dynamic focus correction in adaptive optics testbeds using closed-loop feedback from Shack-Hartmann sensors.
- Multi-degree-of-freedom coordinate measurement machines (CMMs) where thermal drift compensation is implemented via real-time encoder interpolation.
- High-throughput wafer inspection platforms integrating with machine vision subsystems for defect mapping at ≤1 µm pixel resolution.
FAQ
What encoder resolutions are supported, and how do they affect closed-loop performance?
The LMA series supports selectable encoder resolutions of 0.1 µm, 1 µm, or 5 µm—each corresponding to different feedback bandwidths and noise floor trade-offs. Sub-micron resolution requires glass scale integration and is recommended for applications demanding <±0.005 mm absolute accuracy under ISO 10360-2 verification.
Can the stage operate in partial vacuum or inert gas environments?
Standard configurations are rated for ambient air operation. Vacuum-ready variants (down to 10⁻⁴ Pa) are available with modified lubrication, venting, and outgassing-tested materials—subject to custom quotation and lead time extension.
Is the controller firmware upgradable in the field?
Yes—firmware updates are delivered via USB or Ethernet using ZOLIX-signed binaries, preserving cryptographic integrity and ensuring version-controlled traceability per IEC 62304 Class B software lifecycle requirements.
How is thermal drift compensated across the full travel range?
While the base design minimizes coefficient-of-thermal-expansion mismatch (Al 6061-T6 + hardened steel rails), active compensation requires external temperature sensing and feed-forward correction within the host controller—supported via analog input channels in ZMCS v4.2+.



