RockTec RCZ-5 Intelligent Harvesting Robot for Protected Horticulture
| Brand | RockTec (BiAgro) |
|---|---|
| Origin | Shanghai, China |
| Manufacturer Type | Authorized Distributor |
| Country of Origin | China |
| Model | RCZ-5 |
| Pricing | Upon Request |
Overview
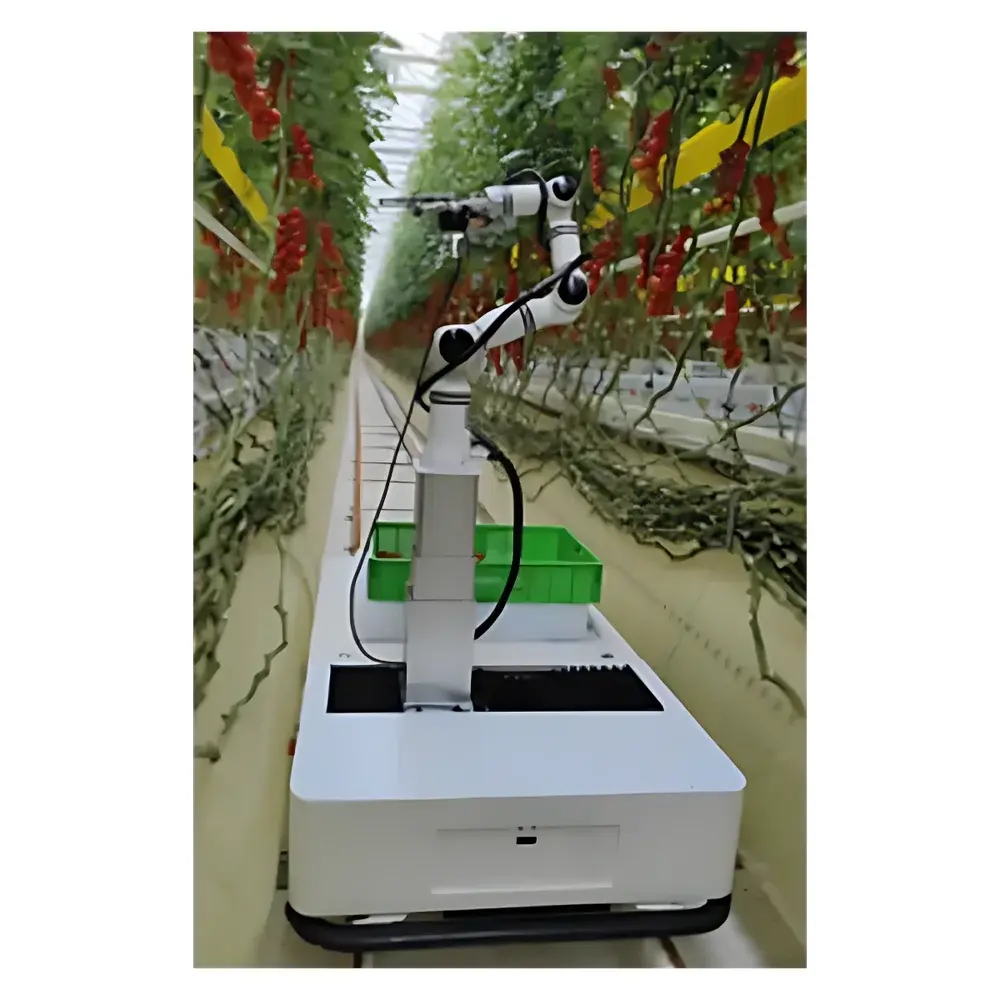
The RockTec RCZ-5 Intelligent Harvesting Robot is an integrated autonomous field robot engineered for precision harvesting in controlled-environment agriculture—specifically greenhouse tomato cultivation. It operates on a multi-sensor fusion architecture combining stereo vision, time-of-flight depth sensing, and 2D/3D LiDAR to execute real-time fruit detection, maturity classification, spatial localization, and collision-free navigation. Unlike conventional pick-and-place systems, the RCZ-5 implements a full-cycle horticultural workflow: visual assessment → kinematic path planning → adaptive grasping → selective pedicel cutting → gentle bin placement — all within a single robotic platform. Its design adheres to agricultural robotics standards for low ground pressure, non-destructive handling, and operational compatibility with standard greenhouse infrastructure (e.g., inter-row spacing ≥ 0.8 m, ceiling height ≥ 2.8 m). The system does not rely on pre-installed markers or fixed infrastructure, enabling rapid deployment across heterogeneous greenhouse layouts.
Key Features
- 7-DOF lightweight robotic arm with inverse kinematics solver optimized for constrained greenhouse workspaces; repeatability ±0.3 mm under payload ≤ 1.2 kg
- Fully adaptive soft-gripper end-effector with force feedback control (0–3 N range), compliant actuation, and variable aperture (15–65 mm) to accommodate tomato clusters, cherry tomatoes, and other fragile horticultural produce without bruising or stem damage
- Multi-modal perception stack: dual RGB-D cameras (1280×720 @ 30 fps, 0.1–3.5 m depth range), 360° rotating 2D LiDAR (10 Hz scan rate, 0.05–10 m range), and optional ultrasonic proximity sensors (±2 cm accuracy)
- ROS 2 (Humble) middleware framework with modular node architecture:
harvest_vision,nav_slam,arm_control, andfruit_segmentation— all published under permissive BSD-3 license for academic and commercial integration - Dual mobility options: wheeled chassis (minimum turning radius 1.5 m, max incline 8°) or rail-mounted variant (turning radius ≥ 3 m, compatible with embedded aluminum T-rails per ISO 9001-certified greenhouse construction specs)
Sample Compatibility & Compliance
The RCZ-5 is validated for Solanum lycopersicum (tomato) harvesting across indeterminate and determinate cultivars grown in hydroponic or substrate-based greenhouse systems. It supports cluster-harvest protocols aligned with EU Regulation (EC) No 1223/2009 Annex III (post-harvest handling standards) and complies with ISO 11228-3:2019 (ergonomic principles for manual and mechanical harvesting tasks). While designed for tomatoes, its ROS-based perception and control modules are extensible to Cucumis sativus (cucumber) and Fragaria × ananassa (strawberry) via retraining of the YOLOv8-based fruit detector and recalibration of gripper compliance parameters. All electrical components meet IP54 ingress protection rating; battery system conforms to UN 38.3 transport safety requirements.
Software & Data Management
The onboard software suite includes a web-accessible dashboard for remote monitoring (HTTPS/TLS 1.2), real-time telemetry logging (JSON/CSV export), and audit-trail generation compliant with GLP documentation requirements. Sensor data streams (point clouds, bounding box annotations, joint torque logs) are timestamped with PTPv2 synchronization. SLAM mapping outputs are stored as occupancy grids (.pgm + .yaml) compatible with ROS Navigation Stack v1.18+. For regulatory traceability, the system supports optional FDA 21 CFR Part 11-compliant electronic signatures when integrated with third-party identity management platforms. Source code repositories, URDF models, and calibration procedures are provided to end users under a commercial redistribution license.
Applications
The RCZ-5 serves three primary deployment tiers: (1) Operational use in commercial greenhouse facilities (>5,000 m²) seeking labor-cost reduction and harvest timing optimization; (2) Educational deployment in agricultural engineering programs at universities and vocational institutes for robotics curriculum development and crop-robot interaction research; (3) Demonstration and public engagement contexts including agritech expos, national agricultural innovation centers, and smart farming pilot zones. Field trials conducted across 12 greenhouse sites in Jiangsu and Shandong provinces demonstrated average harvest success rates of 91.7% (n=4,280 fruits), with mean cycle time of 14.3 s per fruit under ambient illumination ≥ 15,000 lux.
FAQ
What crops can the RCZ-5 harvest out of the box?
The system ships with production-ready models for red-ripe tomato detection and cluster segmentation. Other crops require dataset curation and model fine-tuning using the provided annotation toolkit.
Does the robot support integration with existing greenhouse climate control systems?
Yes — via Modbus TCP or MQTT interfaces; integration guides for Priva, Hoogendoorn, and Argus systems are included in the technical documentation package.
Is remote firmware update capability available?
Firmware updates are delivered over secure OTA channels with SHA-256 signature verification and rollback recovery. Updates require operator approval via authenticated web console.
What level of greenhouse infrastructure modification is required?
None for wheeled configuration. Rail-mounted version requires mounting brackets fixed to existing greenhouse foundation or raised beds — no structural reinforcement needed.
Can the RCZ-5 operate during nighttime or low-light conditions?
Yes — active IR illumination (850 nm) is integrated into the stereo camera housing, maintaining detection accuracy under illumination as low as 50 lux.