LaVision OA-STB Object-Aware Shake-the-Box 3D3C Particle Image Velocimetry System
| Brand | LaVision GmbH |
|---|---|
| Country of Origin | Germany |
| Model | OA-STB |
| Measurement Capability | 3D3C (Three-Dimensional, Three-Component) |
| Measurement Frequency | Low-Frequency Temporal Resolution |
| Velocity Range | 0–1000 m/s |
| Accuracy | ±1% of measured velocity |
| Measurement Volume | 1 m × 1 m × 1 m |
| Software Requirement | DaVis 11.2 or later |
Overview
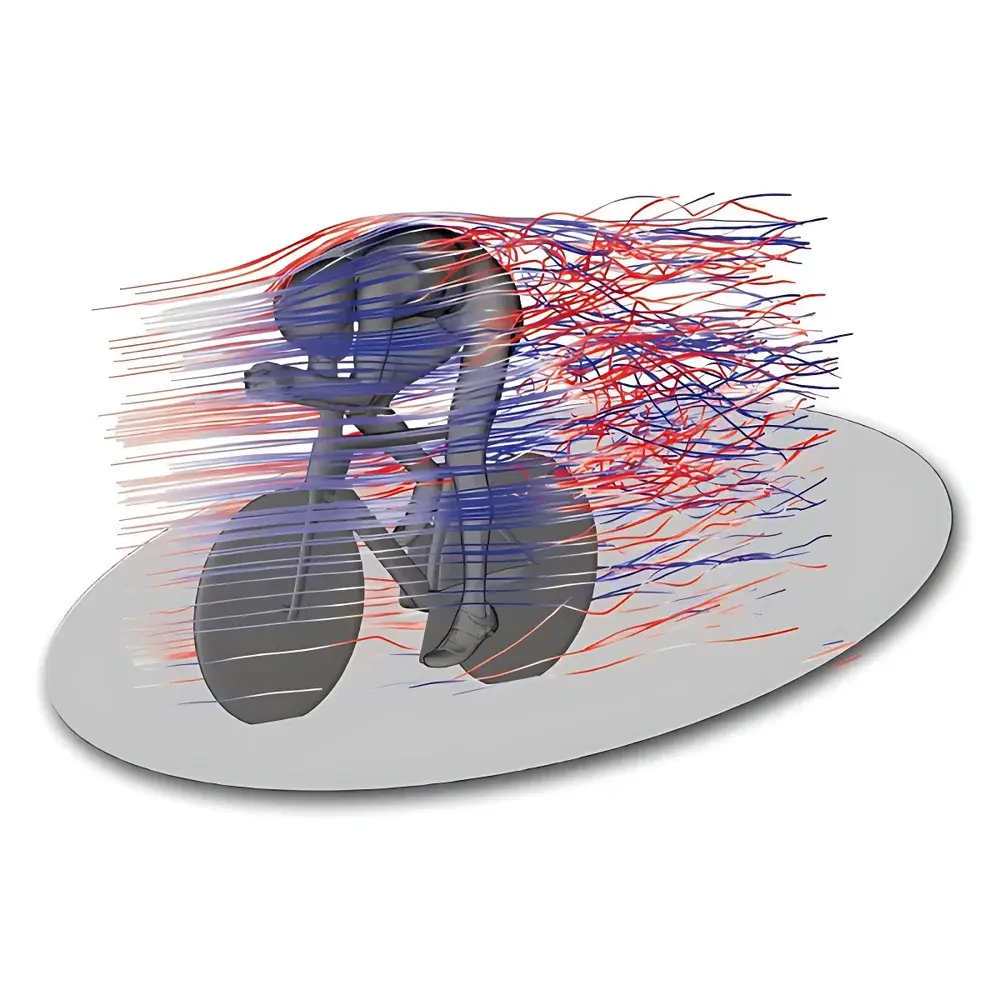
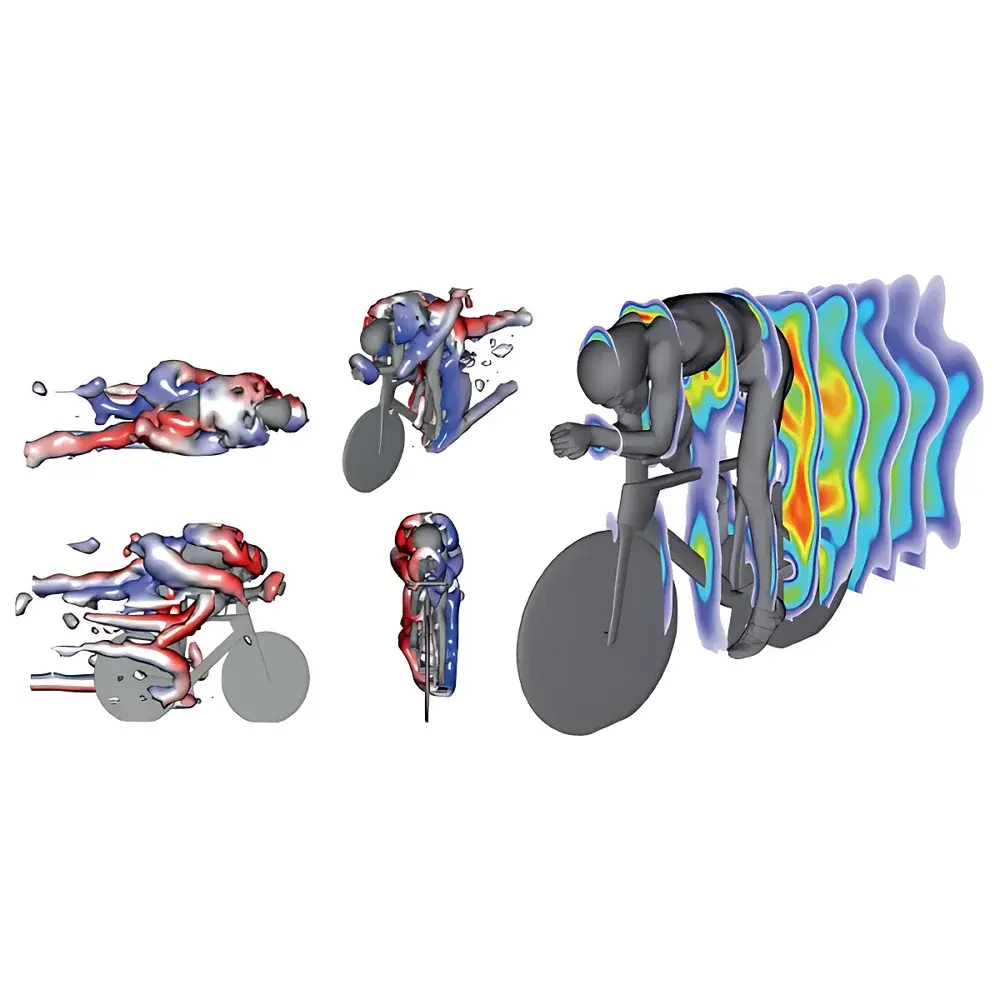
The LaVision OA-STB Object-Aware Shake-the-Box 3D3C Particle Image Velocimetry (PIV) System is an advanced volumetric flow measurement platform engineered for Lagrangian particle tracking in complex, obstructed domains. Building upon the foundational Shake-the-Box (STB) algorithm—co-developed with the German Aerospace Center (DLR) in Göttingen—the OA-STB variant introduces object-aware reconstruction by integrating high-fidelity geometric information of solid boundaries directly into the iterative particle reconstruction (IPR) process. Unlike conventional tomographic PIV or standard STB approaches, OA-STB explicitly encodes surface geometry via depth maps derived from calibrated multi-camera imaging and CAD model alignment. This enables robust trajectory reconstruction even in regions where optical access is partially occluded by immersed structures, making it uniquely suited for fluid–structure interaction (FSI) studies, aerodynamic testing around bluff bodies, and transient flow analysis in confined or instrumented environments.
Key Features
- Object-aware reconstruction: Seamless integration of CAD-based obstacle geometry into volumetric particle tracking via depth-map-assisted IPR.
- Full 3D3C vector field resolution: Simultaneous acquisition of all three velocity components across a cubic measurement volume (1 m × 1 m × 1 m).
- Multi-camera 360° coverage: Eliminates the need for sequential repositioning; enables instantaneous full-surround flow mapping without stitching artifacts or domain discontinuities.
- Marker-based CAD registration: Surface-mounted reference markers are triangulated to align digital models precisely within the experimental coordinate system prior to reconstruction.
- Depth map generation: Per-camera, per-pixel distance-to-surface data derived from calibrated camera geometry and registered CAD mesh—used dynamically during IPR to gate valid ray contributions.
- Native DaVis 11.2+ support: Fully integrated workflow including real-time visualization of vector fields, particle trajectories, and registered CAD geometry in synchronized overlay.
Sample Compatibility & Compliance
The OA-STB system is compatible with standard micron-scale seeding particles (e.g., DEHS, DOP, or fluorescent polystyrene) and supports both continuous-wave and pulsed laser illumination configurations. Its object-aware architecture ensures reliable performance in applications involving fixed or moving solid boundaries—including wind tunnel models, turbine blades, biomedical implants, and urban-scale architectural mock-ups. From a regulatory standpoint, the system supports audit-ready data provenance when operated under GLP-compliant workflows. All calibration parameters, marker reconstruction logs, depth map metadata, and reconstruction settings are stored immutably within DaVis project files—facilitating traceability in accordance with ISO/IEC 17025 requirements for measurement laboratories. While not a medical device, its data output structure is compatible with downstream validation against ASTM F3081 (standard practice for PIV in biomedical flows) and ISO 20457 (optical measurement of fluid motion).
Software & Data Management
OA-STB functionality is implemented exclusively within LaVision’s DaVis software platform (v11.2 or newer), which provides a unified environment for camera calibration, volume self-calibration, marker reconstruction, depth map generation, and physics-informed particle tracking. All processing steps generate timestamped, versioned metadata logs compliant with FAIR (Findable, Accessible, Interoperable, Reusable) principles. Raw image sequences, reconstructed particle positions (x, y, z, u, v, w), and associated confidence metrics are exportable in HDF5 format—ensuring compatibility with MATLAB, Python (via h5py), and third-party CFD post-processing tools. DaVis also supports optional 21 CFR Part 11-compliant electronic signatures and audit trails when deployed on validated Windows Server environments, meeting documentation rigor requirements for regulated R&D labs.
Applications
- Aerodynamic characterization of full-scale vehicle or aircraft components under realistic mounting conditions.
- Unsteady wake dynamics behind rotating machinery (e.g., wind turbine rotors, propellers) where blade passage induces partial occlusion.
- Flow–structure coupling in cardiovascular simulations, including stent deployment and valve dynamics.
- Transient mixing and entrainment in combustion chambers with injector manifolds or flame holders.
- Urban airflow modeling using scaled physical models with façade-integrated obstructions.
- Validation of large-eddy simulation (LES) and direct numerical simulation (DNS) boundary condition treatments at solid interfaces.
FAQ
What distinguishes OA-STB from conventional tomographic PIV or standard STB?
OA-STB incorporates explicit geometric constraints from CAD models during iterative particle reconstruction—reducing ambiguity in particle correspondence near occluding surfaces and eliminating interpolation artifacts at domain edges.
Is surface marker placement mandatory for OA-STB operation?
Yes—physical markers mounted on the object’s surface are required for initial CAD-to-lab-frame registration; their triangulated coordinates anchor the depth map generation and ensure geometric fidelity.
Can OA-STB be used with non-rigid or deforming objects?
Not natively; the current implementation assumes static or quasi-static geometry. Time-resolved deformation requires external synchronization with modal tracking or stereo-DIC systems.
What minimum camera count is required for OA-STB operation?
A minimum of four synchronized, calibrated cameras is recommended to ensure sufficient ray coverage for robust depth map construction and particle triangulation.
Does OA-STB support real-time reconstruction?
No—OA-STB is a post-processed technique requiring iterative optimization; typical reconstruction times scale with particle density and volume size, ranging from minutes to hours per time step.




