INNALABS INN-202 Quartz Flexure Accelerometer
| Brand | INNALABS |
|---|---|
| Origin | Germany |
| Model | INN-202 |
| Input Range | ±50 g |
| Bias Stability (1 yr) | <350 µg |
| Temperature Sensitivity (Bias) | <50 µg/°C |
| Scale Factor | 1.0–1.4 mA/g |
| Scale Factor Stability (1 yr) | <390 ppm |
| Scale Factor Tempco | <180 ppm/°C |
| Misalignment | <2000 µrad |
| Misalignment Stability (1 yr) | <100 µrad |
| Nonlinearity | <50 µg/g² |
| Operating Temperature | −55 °C to +85 °C |
| Vibration Resistance | 8 g RMS, 20–2000 Hz |
| Shock Rating | 70 g, 11 ms |
| Bandwidth | 800 Hz |
| Resolution | 1 µg |
| Power Supply | ±15 VDC ±10% |
| Current Consumption | <16 mA |
| Power Dissipation | <480 mW |
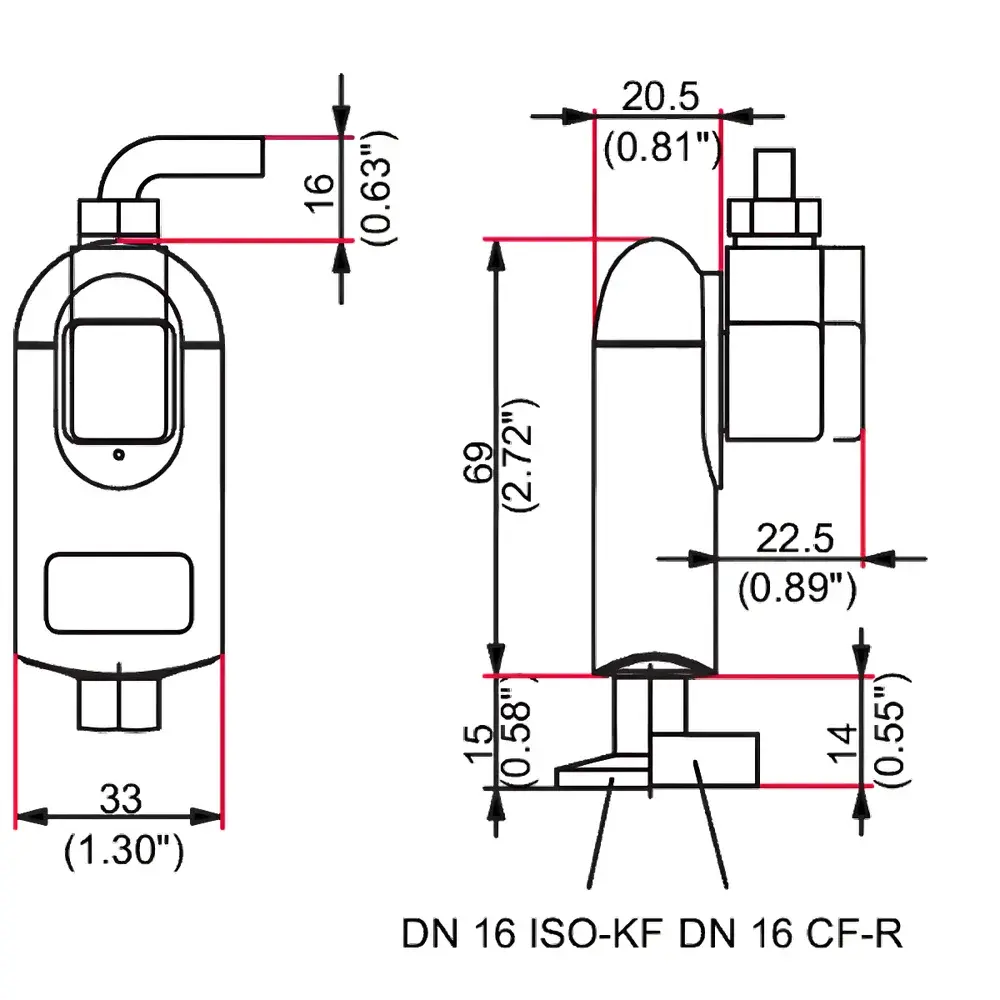
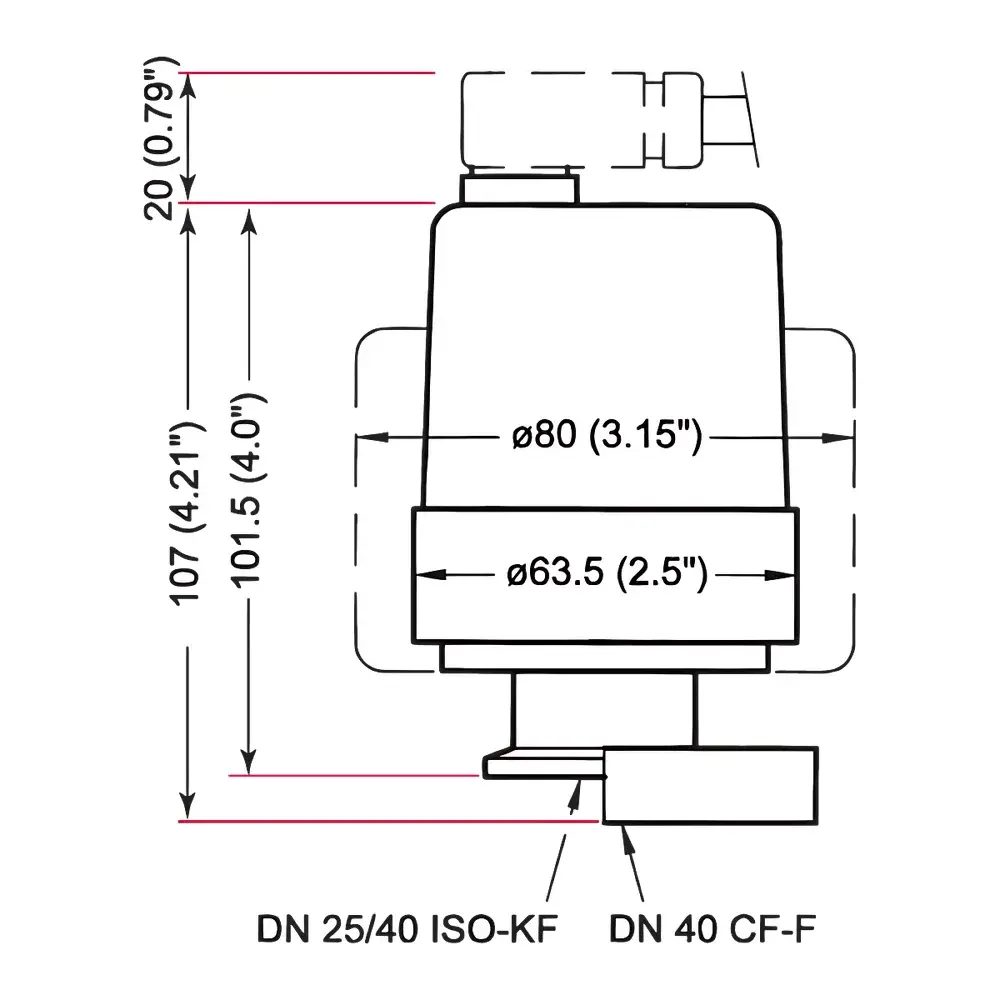
| Dimensions | Φ38.1 × 26 mm |
| Weight | <80 g |
| Housing Material | Stainless Steel |
| Output | Analog (Current Mode) |
| Built-in Bias & Scale Factor Temperature Compensation Models | Yes |
| Connector | 10-pin circular, hermetically sealed |
Overview
The INNALABS INN-202 Quartz Flexure Accelerometer is a navigation-grade inertial sensor engineered for high-reliability applications in aerospace, maritime, and terrestrial guidance systems. Based on proven quartz flexure sensing technology, the INN-202 employs a monolithic quartz proof mass suspended by precision-etched flexure hinges, enabling exceptional mechanical stability and low hysteresis. Its operating principle relies on measuring electrostatic rebalancing current required to maintain the proof mass at null displacement under acceleration—transducing inertial force into a proportional analog current output (1.0–1.4 mA/g). This closed-loop servo architecture ensures linearity, wide dynamic range (±50 g), and immunity to base motion-induced errors. Designed for strapdown inertial navigation systems (SINS), the INN-202 delivers long-term bias stability of <350 µg and scale factor stability of <390 ppm over one year—performance metrics aligned with MIL-STD-883 and IEEE Std 528 requirements for tactical-grade inertial sensors.
Key Features
- Navigation-grade bias stability (<350 µg, 1-year) and scale factor stability (<390 ppm, 1-year)
- Wide full-scale input range: ±50 g with bandwidth up to 800 Hz
- Integrated real-time temperature compensation models for both bias and scale factor—eliminating need for external calibration tables or host-based correction algorithms
- Analog current-output interface (1.0–1.4 mA/g) compatible with standard current-input signal conditioning circuits and analog-to-digital converters
- Hermetically sealed stainless steel housing (Φ38.1 × 26 mm, <80 g) rated for harsh environmental operation (−55 °C to +85 °C)
- High shock and vibration tolerance: 70 g, 11 ms half-sine shock; 8 g RMS random vibration from 20–2000 Hz
- Low power consumption (<16 mA @ ±15 VDC, <480 mW total) suitable for size-, weight-, and power-constrained platforms
- Onboard temperature sensor (PIN 6) and self-test capability (PIN 2) support built-in test (BIT) and health monitoring per DO-160 and MIL-STD-1553B system integration protocols
Sample Compatibility & Compliance
The INN-202 is designed for integration into certified inertial measurement units (IMUs) and attitude and heading reference systems (AHRS) used across civil and defense domains. Its mechanical and electrical interfaces comply with common industry standards including RTCA DO-160G (Section 21, Vibration; Section 22, Shock), MIL-STD-810H (Method 514.7, Vibration; Method 516.7, Shock), and ISO 9001:2015 manufacturing controls. The device supports GLP/GMP-aligned calibration traceability through NIST-traceable facilities. While not inherently compliant with FDA 21 CFR Part 11, its analog output architecture and deterministic behavior make it suitable for use in safety-critical control loops where data integrity is maintained via redundant signal conditioning and watchdog circuitry. All materials meet RoHS 3 and REACH SVHC requirements.
Software & Data Management
The INN-202 operates as a self-contained analog transducer without embedded firmware or digital communication protocols. Signal conditioning, temperature compensation, and navigation filtering are implemented externally—typically within an IMU’s central processor or host navigation computer. However, INNALABS provides comprehensive technical documentation—including full pinout schematics, thermal model coefficients, and polynomial-based temperature compensation equations—for seamless integration into MATLAB/Simulink, LabVIEW, or custom C/C++ navigation software stacks. Calibration reports include full-axis bias, scale factor, misalignment, and nonlinearity matrices referenced to ISO/IEC 17025-accredited laboratories. Raw analog output is compatible with high-resolution (≥24-bit) current-input ADCs used in modern inertial processing units adhering to ARINC 429 or STANAG 4624 data bus architectures.
Applications
- Strapdown inertial navigation systems (SINS) for manned and unmanned aerial vehicles (UAVs), helicopters, and fixed-wing aircraft
- Maritime navigation and stabilization: INS for surface vessels, submarines, autonomous underwater vehicles (AUVs), remotely operated vehicles (ROVs), and USVs
- Land vehicle navigation: GNSS-denied positioning for armored platforms, survey vehicles, and robotic mobile manipulators
- Oil & gas downhole surveying: borehole inclination and azimuth measurement during directional drilling operations
- Stabilization and pointing control systems: antenna platforms, EO/IR turrets, and satellite communication terminals
- Dynamic tilt sensing and velocity/distance integration in high-precision industrial motion control applications
FAQ
Is the INN-202 compatible with digital navigation processors?
Yes—the analog current output can be interfaced directly with current-input ADCs found in FPGA- or ARM-based navigation processors. INNALABS supplies scaling factors and thermal model parameters for seamless integration.
Does the device require external temperature compensation?
No—bias and scale factor temperature models are pre-programmed and applied internally via analog circuitry; no host-side computation is needed for basic operation.
What is the recommended mounting orientation and mechanical interface?
The unit is designed for rigid mounting on flat, thermally stable surfaces using the provided M2.5 threaded holes. Torque must not exceed 0.3 N·m to avoid stress-induced bias shifts.
Can the INN-202 be calibrated in-field?
Field recalibration is not supported; however, the device includes a built-in self-test function (activated via PIN 2) to verify operational continuity prior to mission deployment.
Is radiation hardness data available for space applications?
The INN-202 is not radiation-hardened; for space-qualified variants, contact INNALABS engineering for derivative designs meeting ESA ECSS-E-ST-20-07C requirements.