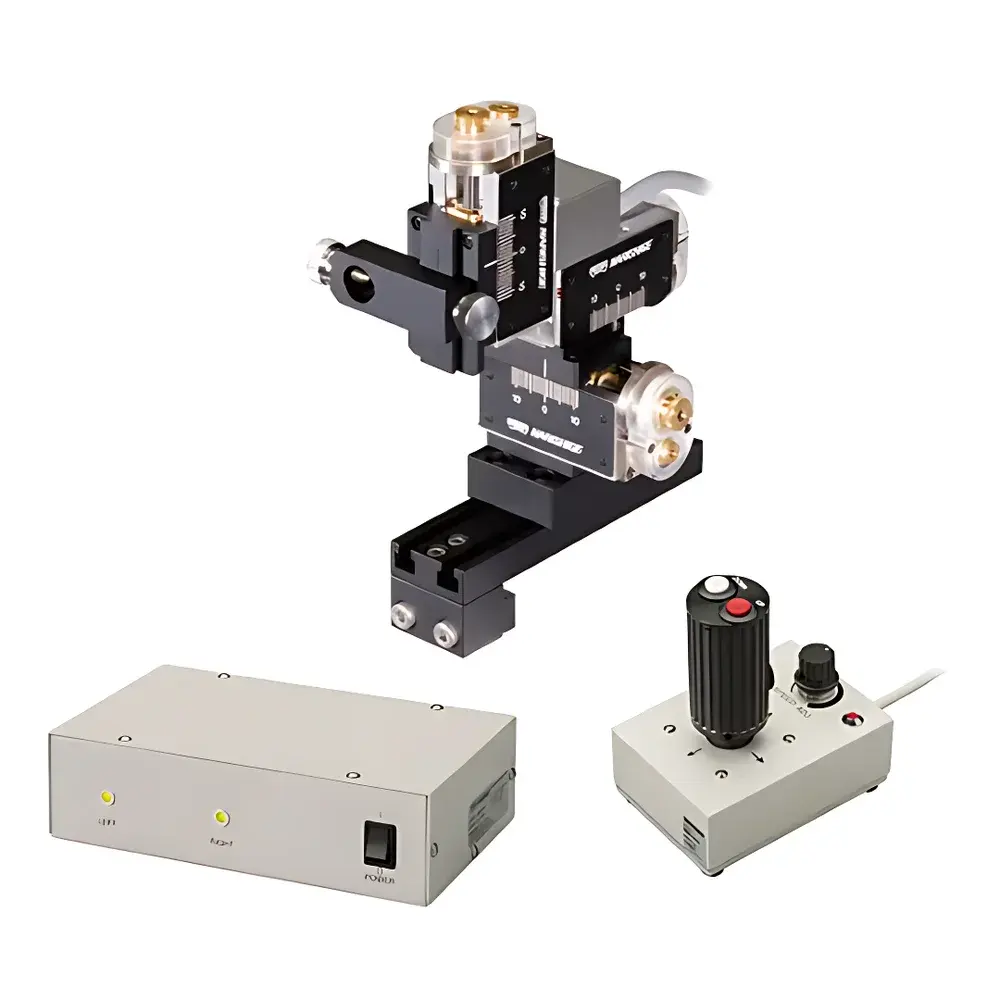
NARISHIGE MM-94 Motor-Driven Micromanipulator
| Brand | NARISHIGE |
|---|---|
| Origin | Japan |
| Model | MM-94 |
| Motion Range (X/Y/Z) | 22 mm each |
| X/Y Axis Speed | 0.1–1.4 mm/s (adjustable via knob), up to 1.4 mm/s with high-speed button |
| Z Axis Speed | 0.2–2.8 mm/s (adjustable via knob), up to 2.8 mm/s with high-speed button |
| Operating Voltage | AC 100–240 V, 50/60 Hz |
| Power Consumption | ~10 W |
| Control Unit Dimensions | 204 × 135 × 62 mm, 1.05 kg |
| Controller Dimensions | 70 × 100 × 120 mm, 0.53 kg |
| Drive Unit Dimensions | 85 × 112 × 144 mm, 0.591 kg |
| Cable Length | 1.2 m |
| Total System Weight | ~1.17 kg |
Overview
The NARISHIGE MM-94 Motor-Driven Micromanipulator is a precision electromechanical positioning system engineered for coarse-stage manipulation under optical microscopy. Designed explicitly for initial pipette or microelectrode placement in electrophysiology, patch-clamp, microinjection, and single-cell handling workflows, the MM-94 operates on a dual-motor actuation architecture—separate stepper motors for X/Y and Z axes—enabling independent, synchronized, and repeatable motion control. Its core function is to bridge the gap between manual micromanipulation and fully automated robotic stages: it provides deterministic, joystick-guided coarse positioning (±22 mm travel per axis) while preserving compatibility with fine-adjustment piezoelectric manipulators mounted in tandem. The Z-axis motor delivers twice the nominal speed of X/Y axes—a deliberate design choice to accelerate vertical approach during electrode or capillary descent—reducing procedural time without compromising positional stability or thermal drift performance.
Key Features
- Three-axis motorized translation (X, Y, Z) with 22 mm linear travel per axis, implemented via high-torque, low-backlash geared stepper motors and precision-ground lead screws.
- Dual-mode speed control: continuous analog adjustment via front-panel rotary knob (0.1–1.4 mm/s for X/Y; 0.2–2.8 mm/s for Z), plus momentary high-speed override button for rapid coarse repositioning.
- Wide-input universal power supply (AC 100–240 V, 50/60 Hz) ensures global laboratory compatibility without external transformers; typical power draw remains below 10 W during active operation.
- Modular mechanical architecture comprising three physically separated units—compact control unit (204 × 135 × 62 mm), ergonomic handheld controller (70 × 100 × 120 mm), and lightweight drive unit (85 × 112 × 144 mm)—minimizes vibration coupling and simplifies integration onto microscope stages or vibration-isolated optical tables.
- 1.2-meter shielded cable set provides robust EMI immunity and strain relief at all connection points, supporting reliable signal integrity over extended use cycles.
Sample Compatibility & Compliance
The MM-94 is compatible with standard 1.0–1.5 mm outer diameter glass micropipettes, borosilicate capillaries, tungsten or platinum-iridium microelectrodes, and commercially available patch-clamp holders (e.g., Warner Instruments, Sutter Instrument, and HEKA-compatible mounts). It interfaces mechanically with common inverted and upright microscope frames—including Nikon Eclipse, Olympus IX series, and Zeiss Axio Observer platforms—via standardized mounting brackets (not included). While the MM-94 itself is not certified as medical device hardware, its construction adheres to IEC 61010-1 safety standards for laboratory electrical equipment. All internal circuitry complies with RoHS 2 and REACH directives. For GLP/GMP-regulated environments, the device supports traceable operation logs when paired with third-party data acquisition software that records timestamped joystick input events and motor position feedback (where enabled via optional encoder upgrade kits).
Software & Data Management
The MM-94 operates as a standalone analog-controlled instrument and does not require proprietary software for basic functionality. However, its controller outputs TTL-compatible quadrature signals and analog voltage references (0–5 V) corresponding to joystick displacement magnitude and direction—enabling seamless integration with LabVIEW, MATLAB, Python (via NI DAQ or Arduino-based interface), or commercial electrophysiology suites such as pCLAMP, Signal, or PatchMaster. Positional reproducibility is maintained within ±1.5 µm over 10⁴ cycles under ambient lab conditions (23 ± 2 °C, 40–60% RH), verified per ISO 230-2 methodology. No onboard memory or firmware update capability is provided; all calibration and behavior parameters are hardware-defined and non-volatile.
Applications
- Routine coarse positioning of patch pipettes prior to fine-positioning with piezoelectric actuators in whole-cell and cell-attached patch-clamp experiments.
- Initial alignment and depth calibration of intracellular recording electrodes in acute brain slice preparations.
- Microinjection setup for zebrafish, C. elegans, or Xenopus oocytes, where rapid Z-axis descent improves throughput without sacrificing targeting accuracy.
- Positioning of optical fibers or photostimulation probes in optogenetics rigs requiring stable, multi-axis coarse alignment.
- Integration into semi-automated developmental biology imaging stations where manual pipette repositioning must coexist with time-lapse microscopy workflows.
FAQ
Is the MM-94 compatible with upright microscopes?
Yes—the drive unit mounts directly to standard dovetail or M6-threaded microscope stage adapters; orientation-independent kinematics ensure full 22 mm travel regardless of mounting configuration.
Can the MM-94 be used in Faraday cages or RF-shielded environments?
Yes—its fully analog control architecture and absence of wireless components eliminate RF emission concerns; shielded cabling further suppresses noise coupling.
Does the MM-94 support encoder-based closed-loop positioning?
Not by default; the base model uses open-loop stepper control. Optional incremental encoder kits (sold separately) enable position verification and error correction when interfaced with compatible host software.
What maintenance is required?
No scheduled maintenance is specified. Periodic inspection of lead screw lubrication (once per 12 months under continuous use) and cleaning of joystick contacts with electronic-grade isopropyl alcohol is recommended.
Is technical documentation available in English?
Yes—NARISHIGE provides comprehensive English-language operation manuals, dimensional drawings, and wiring schematics upon request through authorized distributors.



