
Sunstone Autoholo Submersible In Situ Digital Holographic Imaging System
| Brand | Sunstone |
|---|---|
| Origin | USA |
| Manufacturer Type | Authorized Distributor |
| Origin Category | Imported |
| Model | Autoholo |
| Pricing | Available Upon Request |
| Laser Wavelength | 532 nm |
| Pulse Energy | 2 μJ |
| Pulse Width | 1.3 ns |
| Camera Resolution | 4920 × 3280 pixels |
| Pixel Size (Low-Mag) | 5.5 µm |
| Pixel Size (High-Mag) | 2.5 µm |
| System Dimensions | 90 cm × 96 cm × 30 cm |
| Imaging Volume | 1–20 mL |
| Particle Size Range | 10 µm – 20 mm |
| Operational Depth | Up to 800 m |
Overview
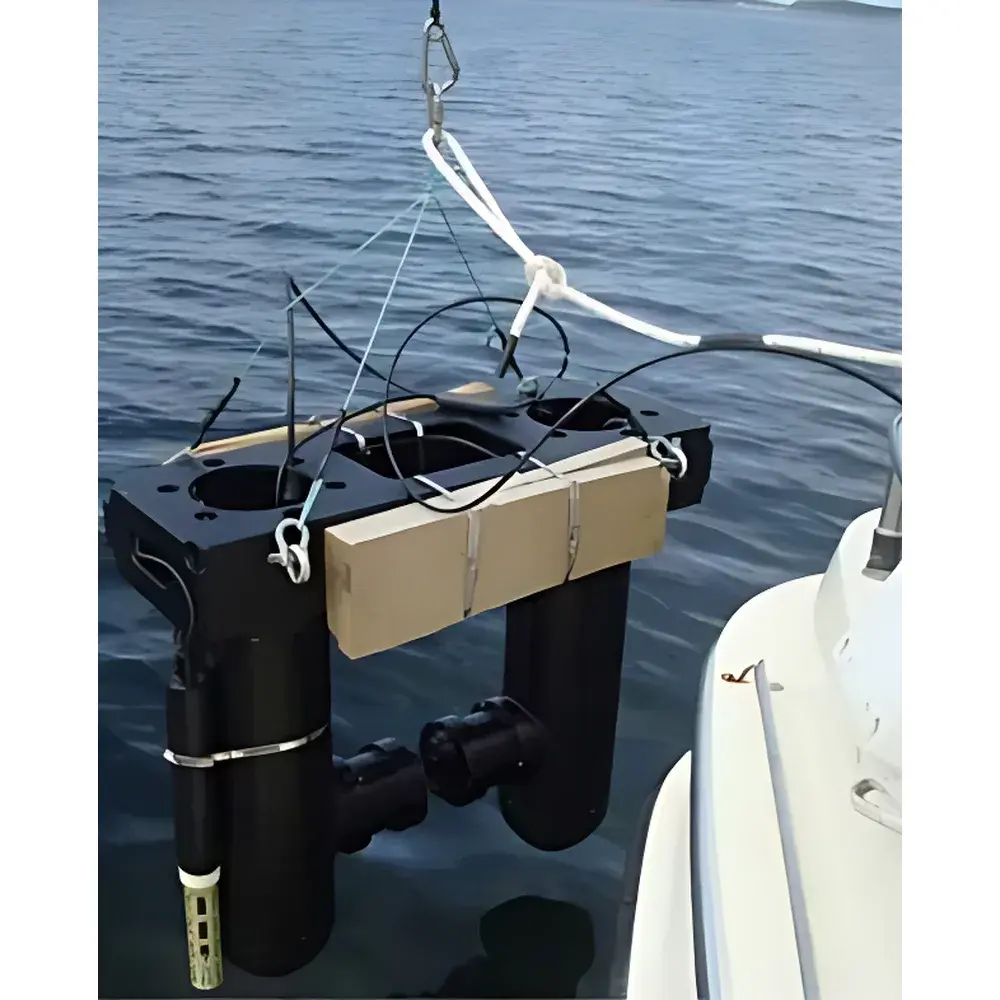
The Sunstone Autoholo Submersible In Situ Digital Holographic Imaging System is an engineered solution for quantitative, non-invasive, three-dimensional microscopic imaging of suspended particles and planktonic organisms directly within aquatic environments. Based on in-line digital holography, the system records interference patterns generated by coherent 532 nm laser light scattered from particles against a uniform reference wavefront. Unlike conventional microscopy or flow cytometry, Autoholo captures the entire sampled volume—up to 20 mL—in a single exposure without physical sampling, filtration, or fixation. The recorded holograms are numerically reconstructed using Kirchhoff–Fresnel diffraction theory, enabling volumetric refocusing across multiple axial planes. This yields spatially resolved, depth-encoded images of particle morphology, orientation, position, and dynamics with micron-level precision. Designed for deployment in marine, estuarine, and freshwater systems, Autoholo operates at depths up to 800 meters and supports profiling, moored, and towed configurations—making it suitable for long-term ecological monitoring, biophysical interaction studies, and optical oceanographic validation.
Key Features
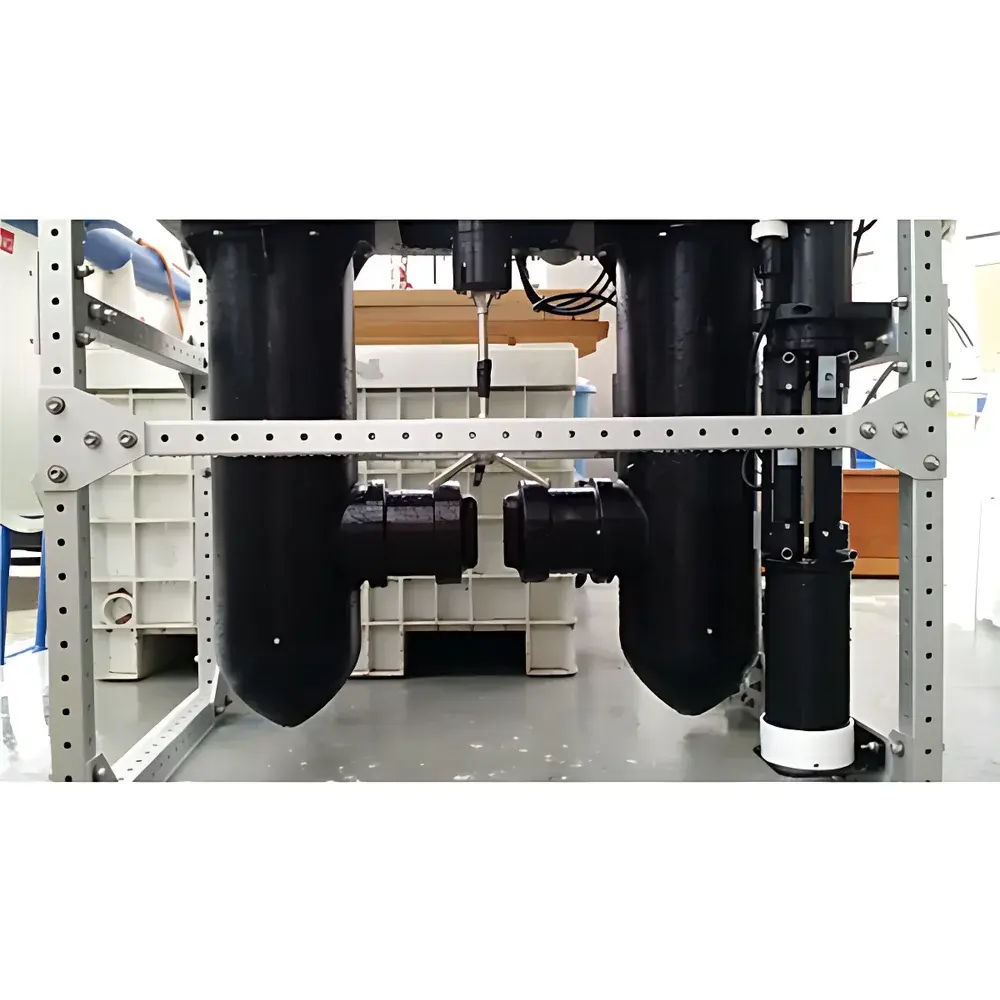
- Submersible, pressure-rated dual-housing architecture: one sealed module houses a pulsed 532 nm laser (2 μJ, 1.3 ns), spatial filter, and beam expander; the second contains a 4920 × 3280 pixel scientific CMOS camera and embedded single-board computer for onboard image acquisition and preprocessing.
- Modular optical path: interchangeable objectives enable resolution scaling from 5.5 µm (low-magnification, large-volume survey) to 2.5 µm (high-magnification, fine-structure analysis) while maintaining consistent depth-of-field and numerical aperture calibration.
- Real-time hologram transmission via fiber-optic link to surface-based control station, supporting live preview, metadata tagging, and lossless storage on redundant SSD arrays compliant with FAIR data principles.
- Non-destructive, label-free operation: no chemical staining, fixation, or flow-induced shear stress—preserving native particle aggregation states, motility behavior, and biofilm integrity during measurement.
- Robust mechanical design: titanium-alloy frame and syntactic foam buoyancy compensation ensure stable orientation under variable current regimes; IP68-rated housings certified to ISO 9001:2015 manufacturing standards.
Sample Compatibility & Compliance
Autoholo is validated for in situ characterization of diverse particulate matter including phytoplankton (diatoms, dinoflagellates, coccolithophores), zooplankton (copepod nauplii, rotifers), detrital aggregates, mineral sediments, microplastics, and bacterial colonies. Its 10 µm – 20 mm detection range accommodates both picoplankton and macrozooplankton within natural concentration gradients (0.1–10⁴ particles/mL). The system complies with ASTM D7927-17 (Standard Guide for In Situ Optical Particle Characterization) and supports GLP-aligned data acquisition workflows, including timestamped audit trails, user-access logs, and instrument calibration certificate traceability to NIST SRM 2806a (microsphere size standards). All firmware and reconstruction algorithms are version-controlled and documented per ISO/IEC 17025:2017 requirements for testing laboratories.
Software & Data Management
The Autoholo Control Suite (v4.2+) runs on Linux-based embedded hardware and provides synchronized triggering, exposure optimization, and real-time hologram compression using lossless HDF5 encoding. Reconstructed volumes are processed through a validated Python-based pipeline incorporating adaptive background subtraction, particle segmentation via watershed + U-Net hybrid models, and 3D morphometric extraction (volume, sphericity, aspect ratio, orientation tensor). Output datasets conform to CF-1.8 NetCDF conventions and include georeferenced metadata (CTD-synchronized depth, temperature, salinity, tilt, heading). Software supports FDA 21 CFR Part 11-compliant electronic signatures, role-based access control, and integration with LIMS platforms via RESTful API. Raw holograms and reconstructed stacks are archived with SHA-256 checksums and persistent DOIs issued through DataCite.
Applications
- Quantitative assessment of phytoplankton community structure, bloom initiation dynamics, and harmful algal species discrimination in coastal and open-ocean settings.
- In situ measurement of particle settling velocities, aggregate porosity, and collision frequency under controlled shear conditions—critical for carbon flux modeling.
- Long-term monitoring of benthic boundary layer resuspension events and sediment transport pathways in shelf-sea environments.
- Validation of satellite-derived ocean color products (e.g., MODIS, Sentinel-3 OLCI) by correlating in-water particle size distribution with remote backscattering coefficients.
- Climate-relevant studies of microbial loop efficiency, viral shunt quantification, and microbe–mineral interactions in cryospheric and hypoxic zones.
FAQ
What is the maximum operational depth rating for the Autoholo system?
The system is rated for continuous operation at depths up to 800 meters, with pressure-compensated optical windows and titanium-housed electronics verified per IEC 60529 IP68 specifications.
Can Autoholo distinguish live from dead phytoplankton cells?
While not inherently fluorescent, Autoholo’s high-fidelity 3D morphology and motility tracking—combined with optional co-deployment of LED-based chlorophyll-a excitation modules—enables indirect viability inference via flagellar motion, cell integrity, and aggregation state.
How is calibration maintained during extended deployments?
Pre-deployment calibration includes NIST-traceable microsphere verification at multiple depths; onboard temperature/pressure sensors feed real-time refractive index correction into the reconstruction kernel, ensuring dimensional accuracy across thermal and hydrostatic gradients.
Is the system compatible with autonomous platforms such as gliders or AUVs?
Yes—Autoholo supports RS-422 serial command protocol and CAN bus integration, enabling synchronization with Slocum, Seaglider, and REMUS vehicle telemetry systems for coordinated multi-sensor surveys.
What data formats are exported from the reconstruction pipeline?
Primary outputs include calibrated 3D particle point clouds (.csv), segmented binary volumes (.h5), and time-stamped metadata bundles (.nc), all compliant with IOOS and PANGAEA submission guidelines.
Related Products